

Wearable type somatosensory control mechanical arm
A somatosensory control and manipulator technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve problems such as difficult to respond to the space state of manipulators, and achieve the effect of easy real-time response, rapid and effective control, and easy observation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
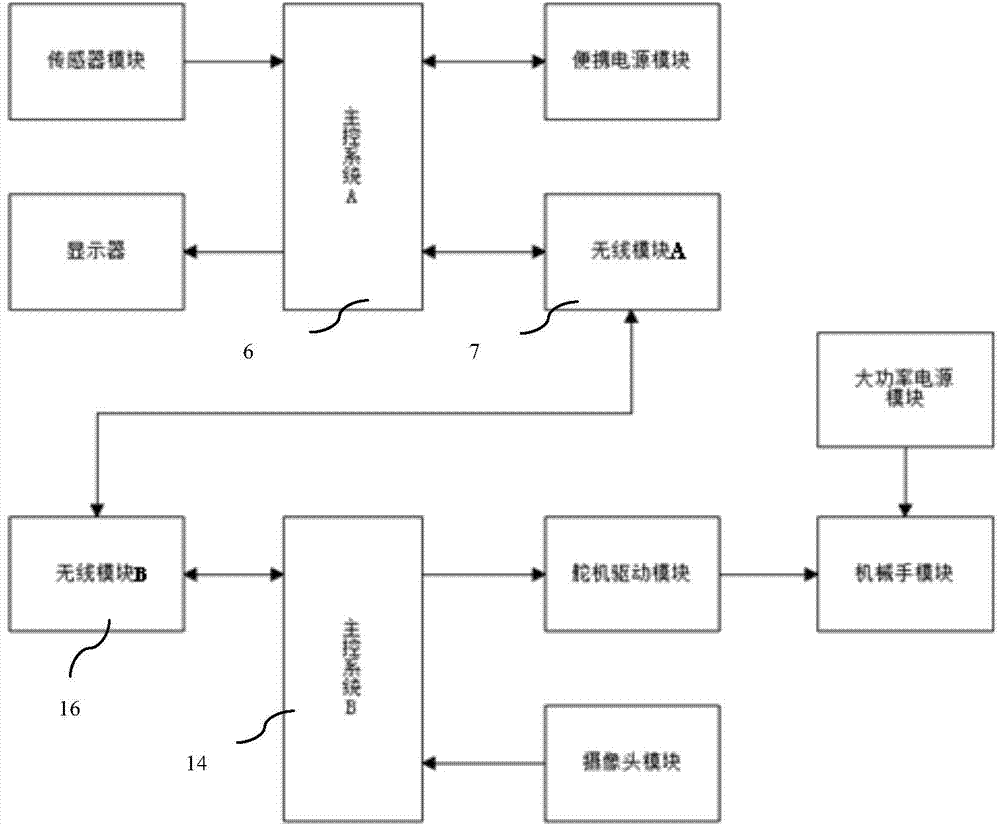
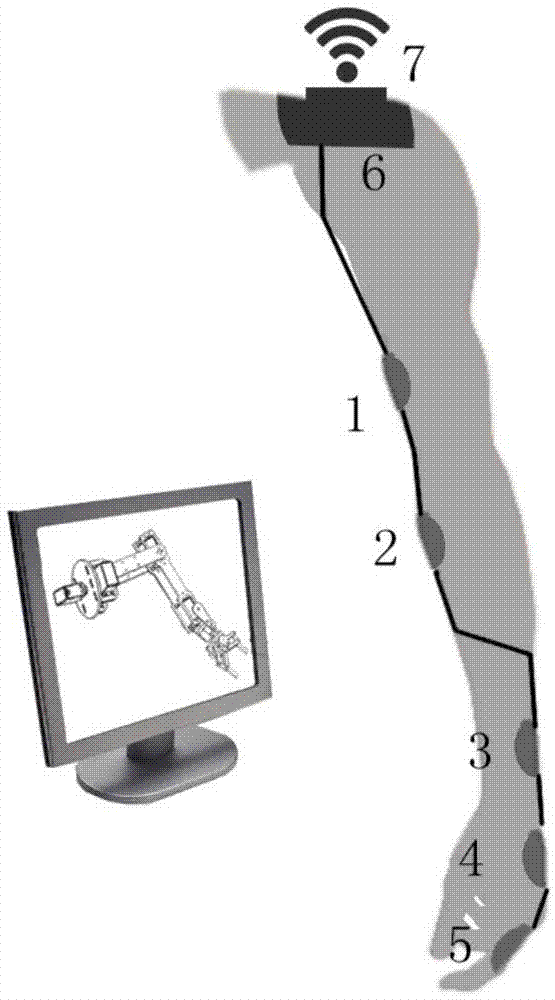
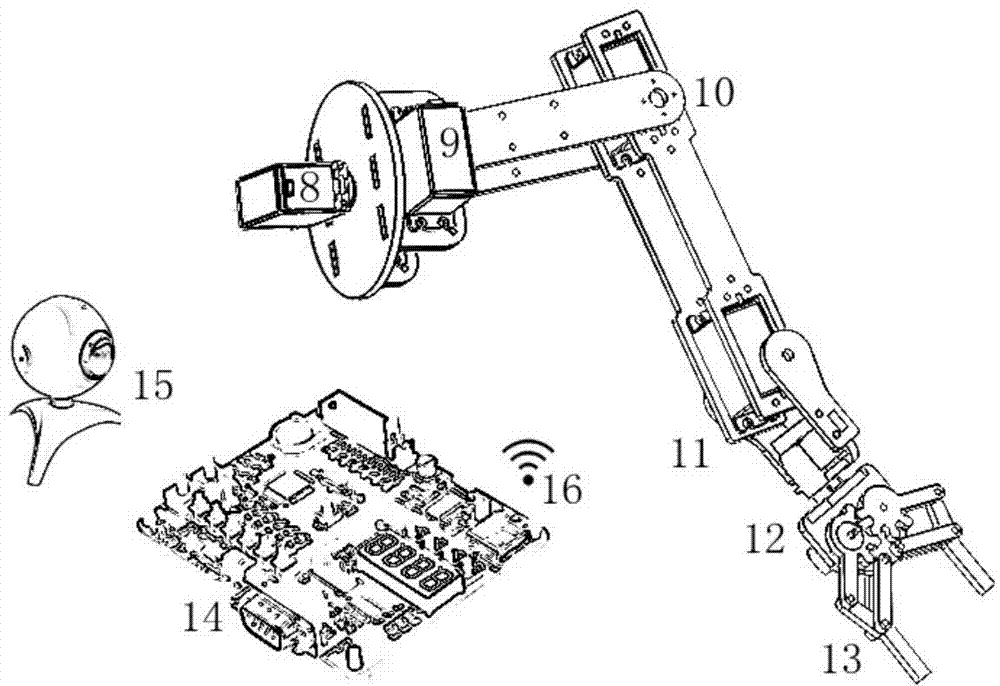
[0022] A wearable somatosensory control manipulator includes a manipulator with human-like features, the joint structure of which is similar to that of human bones, a wireless terminal data processing and transmitting system, a human arm posture data acquisition system, and an arm control terminal data processing and transmitting system. The manipulator is connected to the wireless terminal data processing and transmitting system, the human arm posture data acquisition system is connected to the arm control terminal data processing and transmitting system, and the arm control terminal data processing and transmitting system is connected to the wireless terminal data processing and transmitting system through wireless signals. communication.
[0023] Manipulator: It has the characteristics of human bionics, including the degrees of freedom of upper limb joints, elbow joints, wrist joints, and hand opening and closing. Each joint is controlled by a steering gear with precise angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More