

Mechanical arm tail end tracking and measuring system and method based on coding azimuth device
A technology of tracking measurement and manipulator, which is applied in the direction of manipulator, measuring device, optical device, etc., can solve the problems of high cost, poor reliability and low precision of local networking, and achieve simple structure, low cost, improved stability and reliability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The end-of-manipulator tracking and measurement system and method based on the encoding and orientation device provided by the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
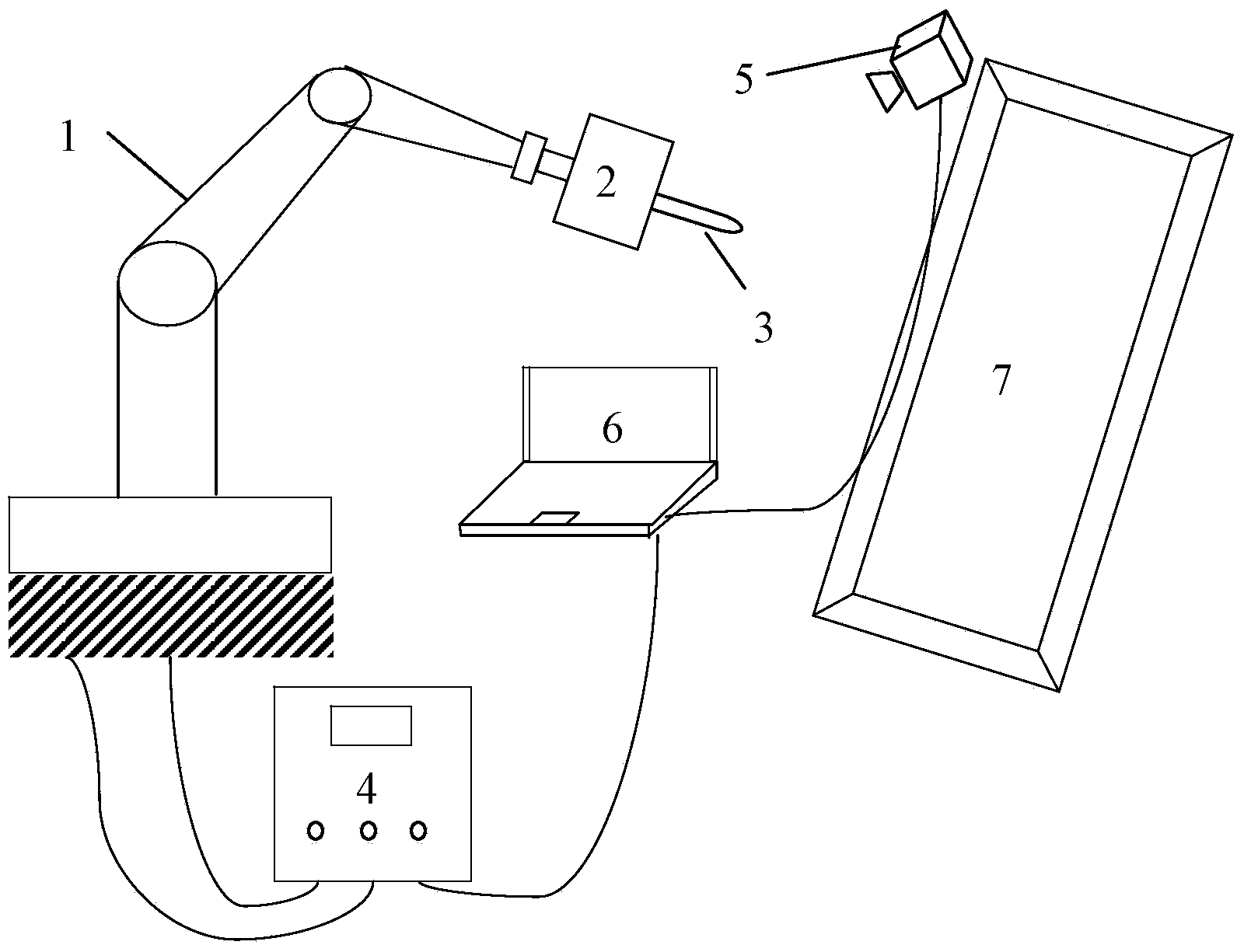
[0033] Such as figure 1 As shown, the end-of-manipulator tracking measurement system based on the coded orientation device provided by the present invention includes: a manipulator 1, a polyhedron code point feature measurement target 2, a manipulator end effector 3, a manipulator control cabinet 4, a measuring camera 5 and The host computer 6; wherein: the mechanical arm 1 is an electric multi-joint industrial mechanical arm, and its movable end is equipped with a polyhedron code point feature measurement target 2 and a mechanical arm end effector 3;
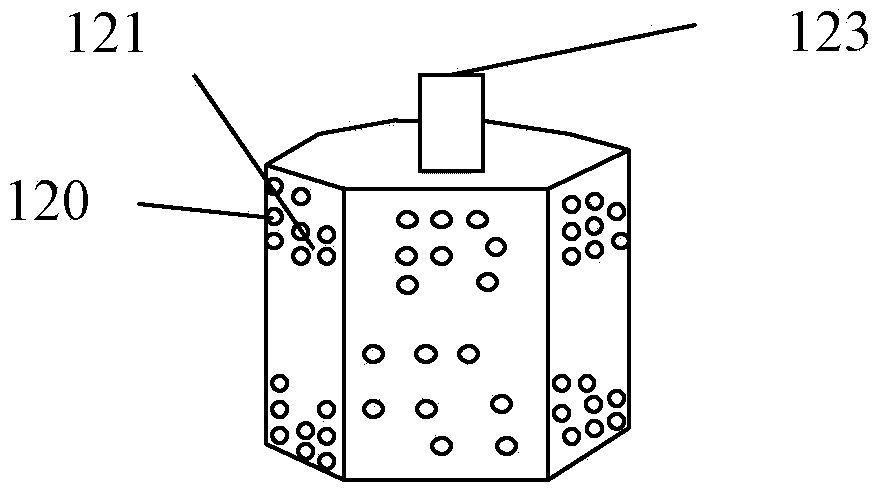
[0034] The polyhedron coded point feature measurement target 2 is a measurement recognition device with coded feature points, which is installed at the connection part bet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More