

Minimally invasive surgery operating arm structure based on DE drivers
A minimally invasive surgery and driver technology, applied in the field of minimally invasive surgery operating arms, to achieve the effect of high mechanical efficiency and control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described in detail below in conjunction with the accompanying drawings.
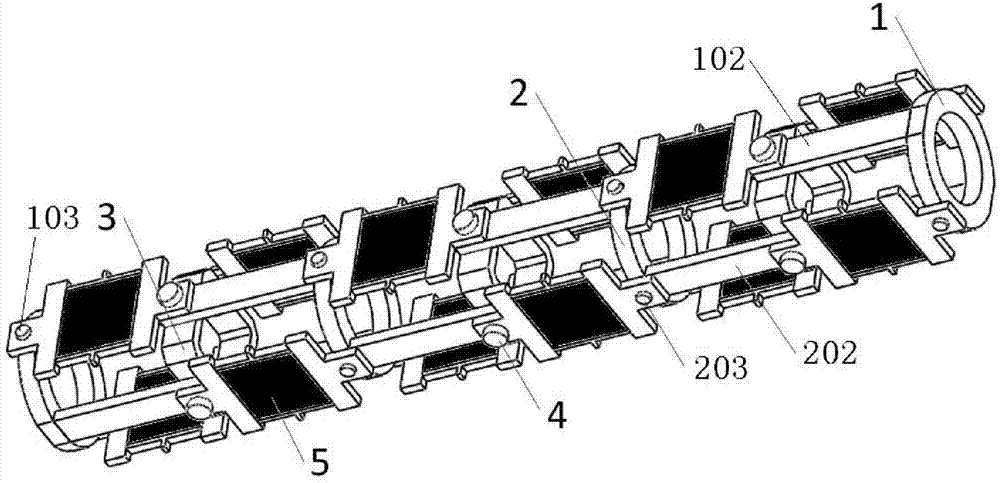
[0031] see Figure 1 to Figure 6 , the present invention is a minimally invasive operation arm structure based on DE driver, including two bases 1, several connecting rods 2, several connecting rings 3, several DE drivers 5 and several rotating shafts 4. Among them, several connecting rods 2 are connected between the two bases 1, and several connecting rings 3 and several rotating shafts arranged in the circumferential direction of the connecting rings are passed between the base 1 and the connecting rods 2, and between the connecting rods 2 and the connecting rods 2. 4, and several DE drivers 5 are connected between the connection ring 3 and the base 1, the connection ring 3 and the connecting rod 2, and the DE drivers 5 are made of flexible biocompatible dielectric elastomer materials.
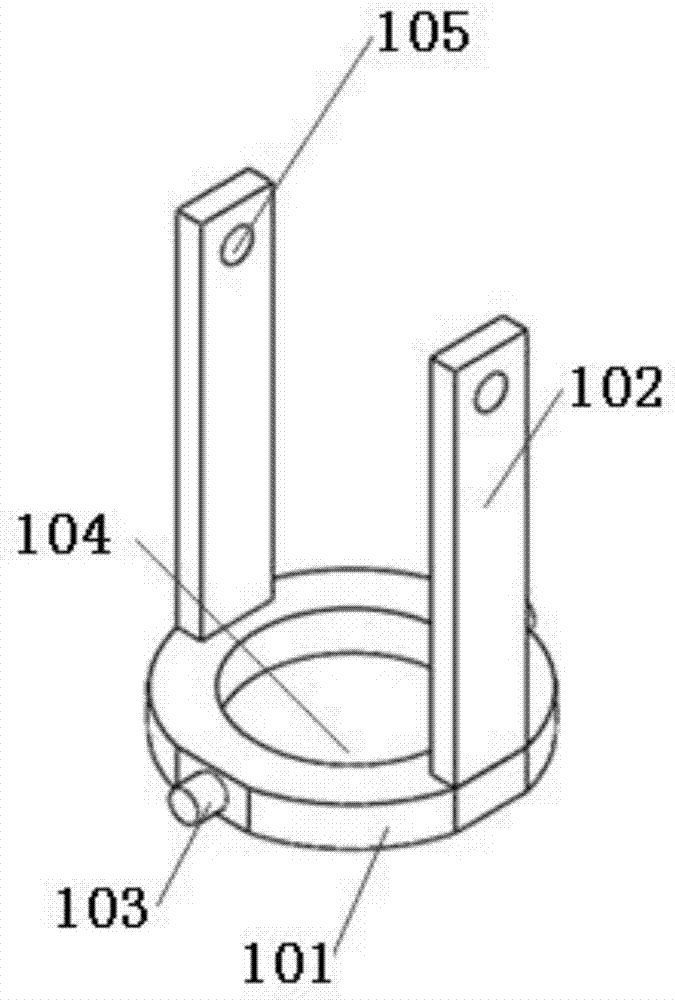
[0032] Further, see figure 2 , the base 1 includes a base round pla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More