

Interactive paraplegia walking-assisting outer bone driven by external power
An exoskeleton and interactive technology, applied in the field of medical devices, can solve the problems of large driving force and energy consumption, large volume and weight, and consumption of patients' physical energy, and achieve the effect of reducing physical energy consumption and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
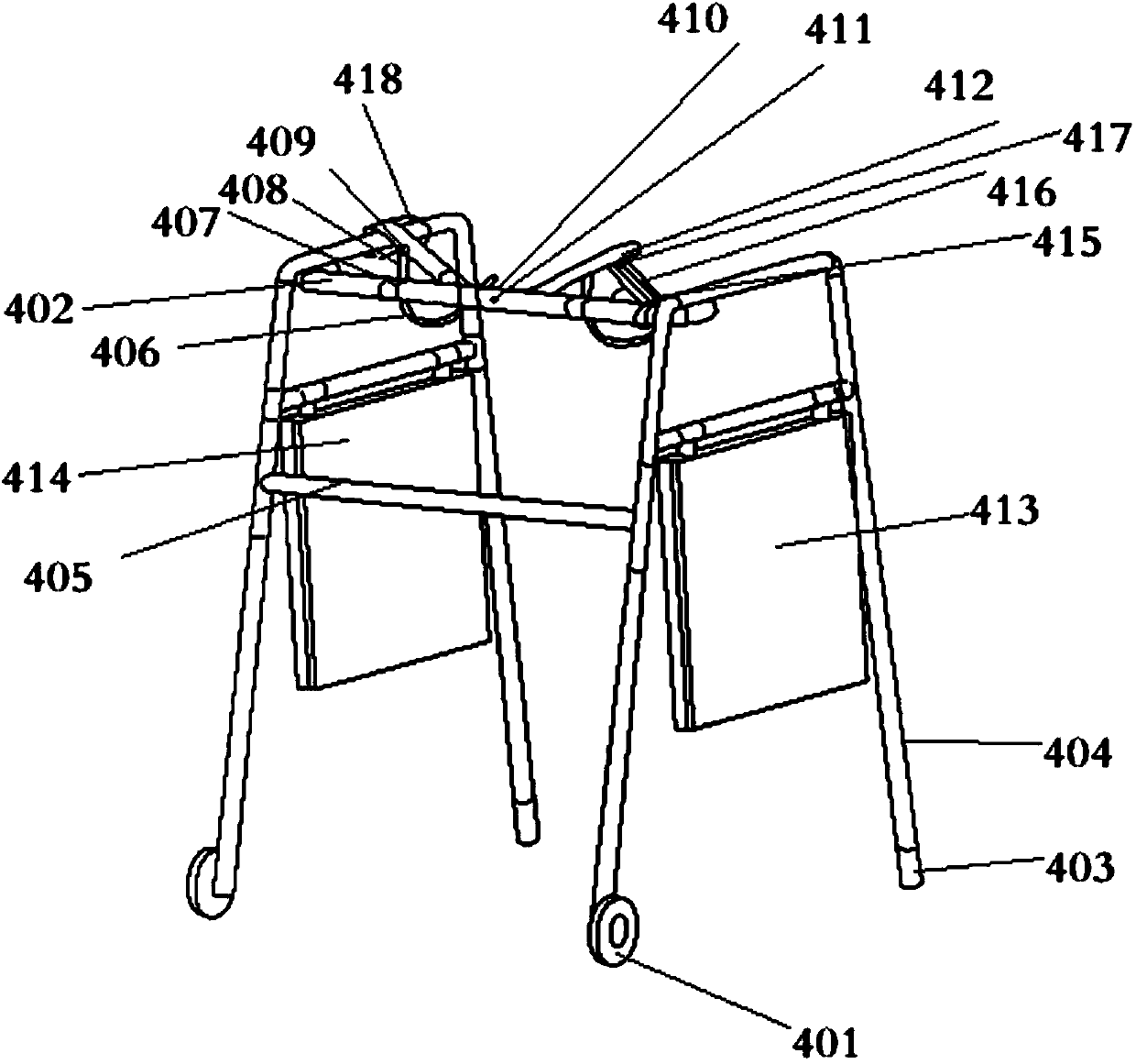
[0028] Such as Figure 1-3 As shown, the interactive paraplegic walker exoskeleton driven by external power according to Embodiment 1 of the present invention includes a rollator with an external drive mechanism, and the wheels 401 of the rollator are installed on the front frame 402 of the vehicle. The rear frame 404 has an anti-skid seat 403, the front frame 402 and the rear frame 404 are connected into one body by the vehicle center beam 405, and the self-force source driving mechanism is connected with the front frame 402 and the rear frame 404 through an interactive hinge support 410, and the interaction Arm bar 412 is driven by electric push rod 416 through electric push rod upper hinge 1 415 and electric push rod lower hinge 2 417, reciprocatingly rotates around interactive hinge 411, and the electric push rod 416 is operated by the hand-controlled button 418 of the paraplegic patient through the controller 414 , the electric push rod 416 is powered by the battery 413, ...
Embodiment 2
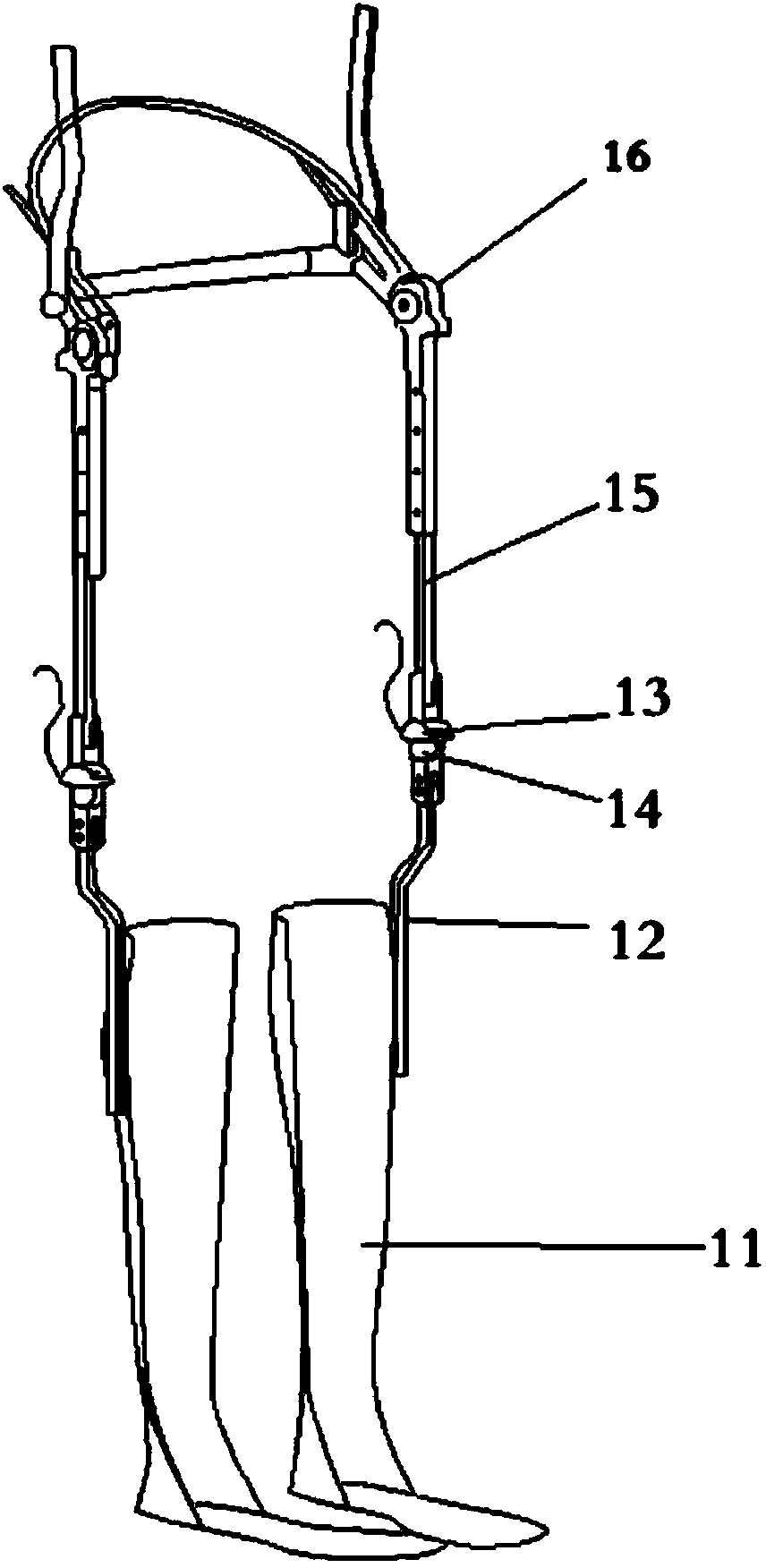
[0032] Such as figure 1 , 4 As shown in , 5, the interactive paraplegic walker exoskeleton driven by external power described in Embodiment 2 of the present invention includes a rollator with an external drive mechanism, and the wheels 401 of the rollator are installed on the front frame 402 , the rear frame 404 has an anti-skid seat 403, the front frame 402 and the rear frame 404 are connected into one body by the vehicle center beam 405, and the driving mechanism of its own force source is connected with the front frame 402 and the rear frame 404 through an interactive hinge support 410 , the interactive arm 412 is driven by the electric push rod 416 via the upper hinge 1 415 of the electric push rod and the lower hinge 2 417 of the electric push rod, reciprocatingly rotates around the interactive hinge 411, and the electric push rod is operated by the hand control button 418 of the paraplegic patient through the controller 414 416 works, the electric push rod 416 is powere...
Embodiment 3
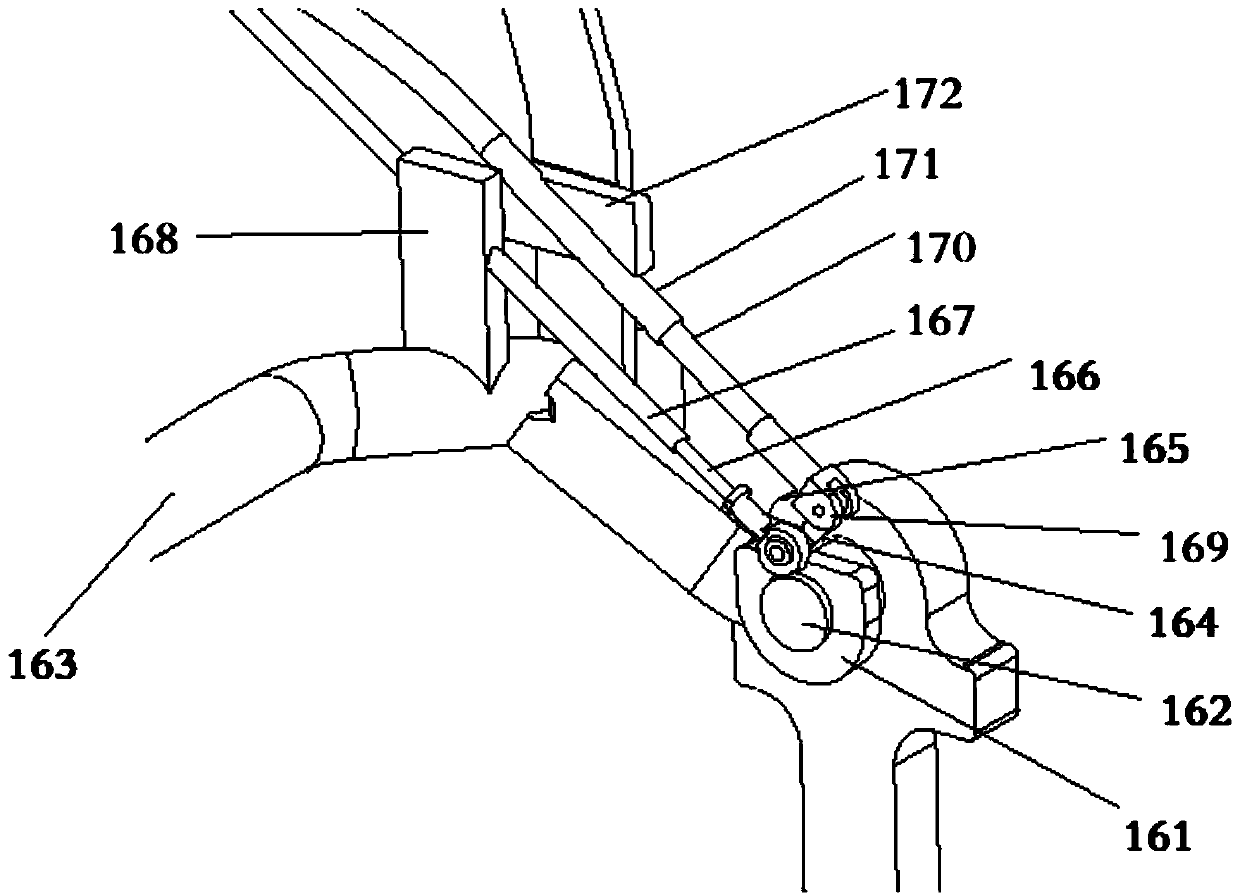
[0036] Such as figure 1 , 6 As shown in , 7, an external power-driven interactive paraplegic walker exoskeleton described in Embodiment 3 of the present invention includes a rollator with an external power drive mechanism, and the wheels 401 of the rollator are installed on the front frame 402 , the rear frame 404 has an anti-skid seat 403, the front frame 402 and the rear frame 404 are connected into one body by the vehicle center beam 405, and the driving mechanism of its own force source is connected with the front frame 402 and the rear frame 404 through an interactive hinge support 410 , the interactive arm 412 is driven by the electric push rod 416 via the upper hinge 1 415 of the electric push rod and the lower hinge 2 417 of the electric push rod, reciprocatingly rotates around the interactive hinge 411, and the electric push rod is operated by the hand control button 418 of the paraplegic patient through the controller 414 416 works, the electric push rod 416 is powe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More