

Novel collision and obstacle avoidance structure for floor sweeping robot
A sweeping robot, a new technology, applied in the direction of machine components, etc., can solve the problems of misjudgment of obstacles, failure to provide accurate and effective collision azimuth, etc., to achieve the effect of protecting internal circuits and increasing reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
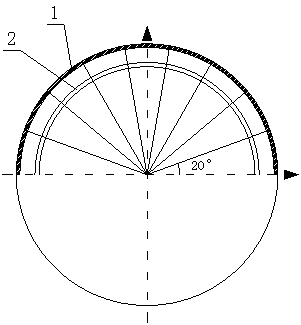
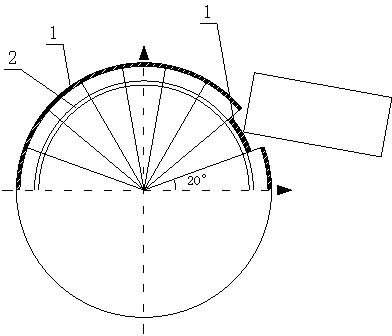
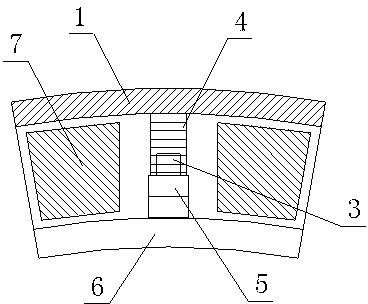
[0033] The new collision avoidance structure of the sweeping robot is set at the front end of the sweeping robot and consists of at least three collision detection units. Each collision detection unit includes an arc-shaped movable cover 1 and a fixed detector 2 matched with the arc-shaped movable cover 1. Each The arc-shaped movable cover 1 of the collision detection unit is combined to form the semicircular front cover of the front end of the cleaning robot.
[0034] Such as figure 1 As shown, there are nine collision detection units, the angle between each collision detection unit is 20°, and the nine-segment arc-shaped movable cover 1 of the nine collision detection units is combined to form the semicircular front cover of the front end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More