

Unmanned aerial vehicle space navigation method, unmanned aerial vehicle control system and unmanned aerial vehicle control device
A navigation method and unmanned aerial vehicle technology, applied in the field of navigation, can solve the problems that unmanned aerial vehicles can not work for a long time, and GPS navigators cannot realize unmanned aerial vehicle navigation, identification and detection, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
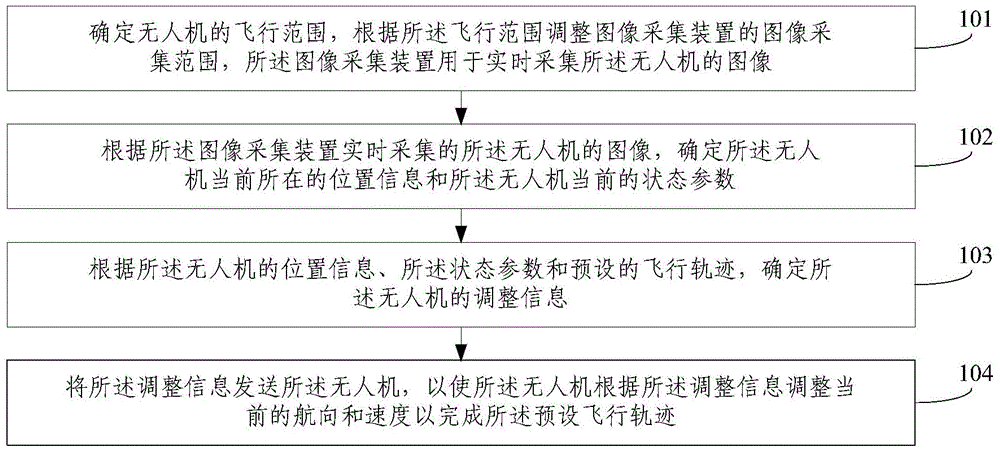
[0047] figure 1 A schematic flow chart of a method for spatial navigation of an unmanned aerial vehicle provided by an embodiment of the present invention, such as figure 1 As shown, the UAV space navigation method of this embodiment is as follows.
[0048] 101. Determine the flight range of the UAV, and adjust the image acquisition range of the image acquisition device according to the flight range, and the image acquisition device is used to collect images of the UAV in real time.
[0049] It can be understood that before the flight of the UAV is determined, the flying working range of the UAV, ie, the flight range, needs to be calibrated so as to determine the video a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More