

Grabbing-locking self-adaptive robot finger device
A robotic finger and self-adaptive technology, applied in the direction of manipulators, joints, chucks, etc., can solve problems such as inability to grasp objects, objects falling off, and no gripping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific structure and working principle of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
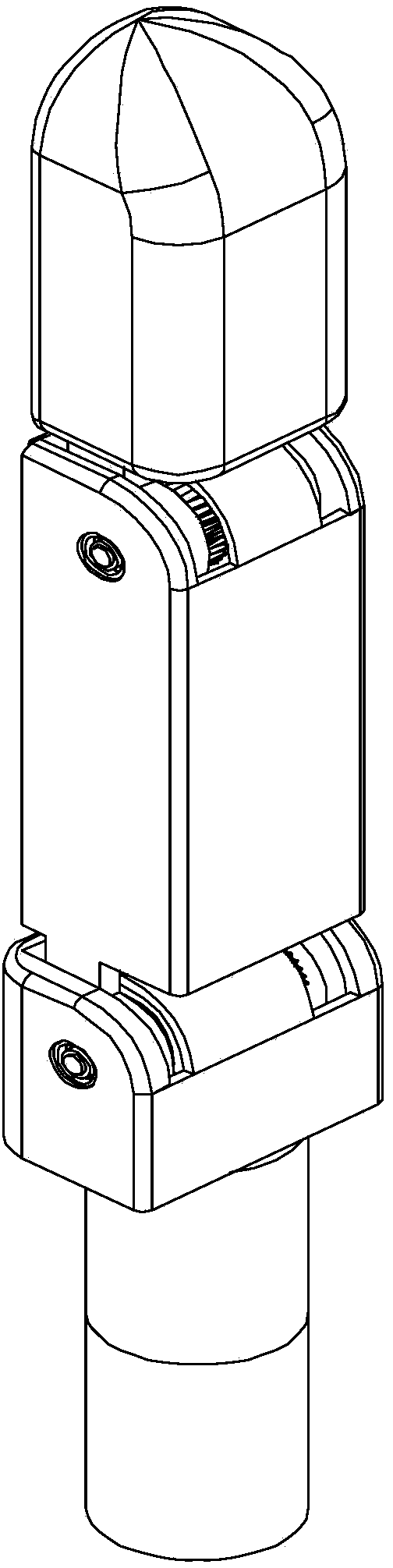
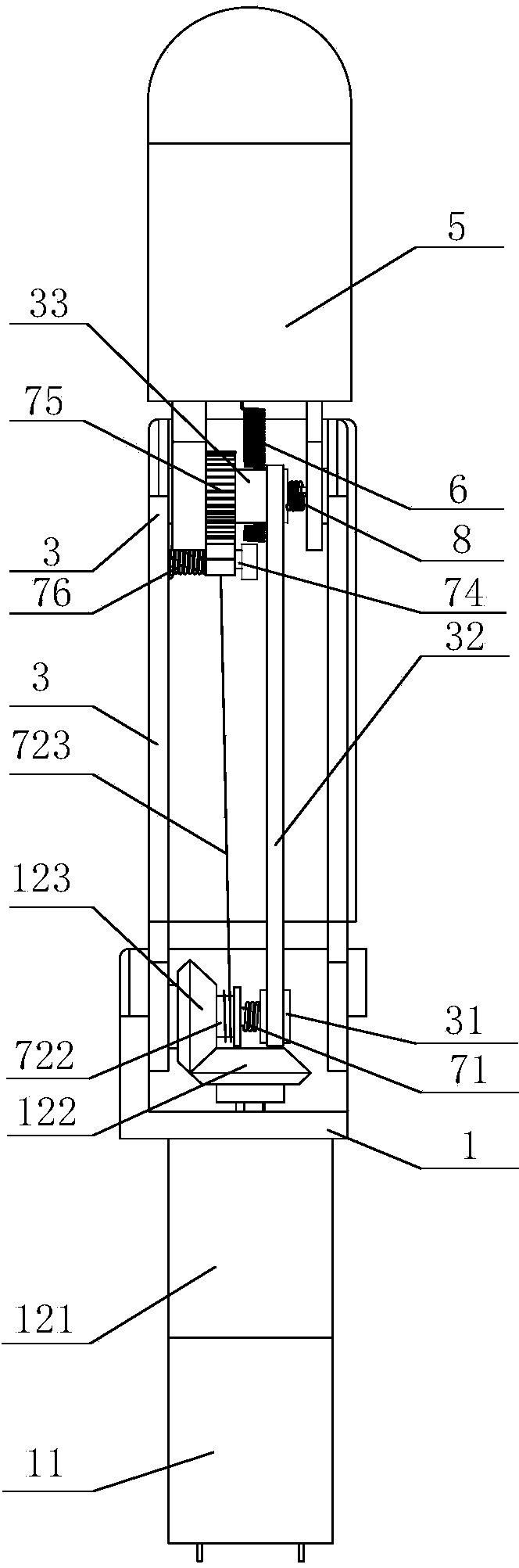
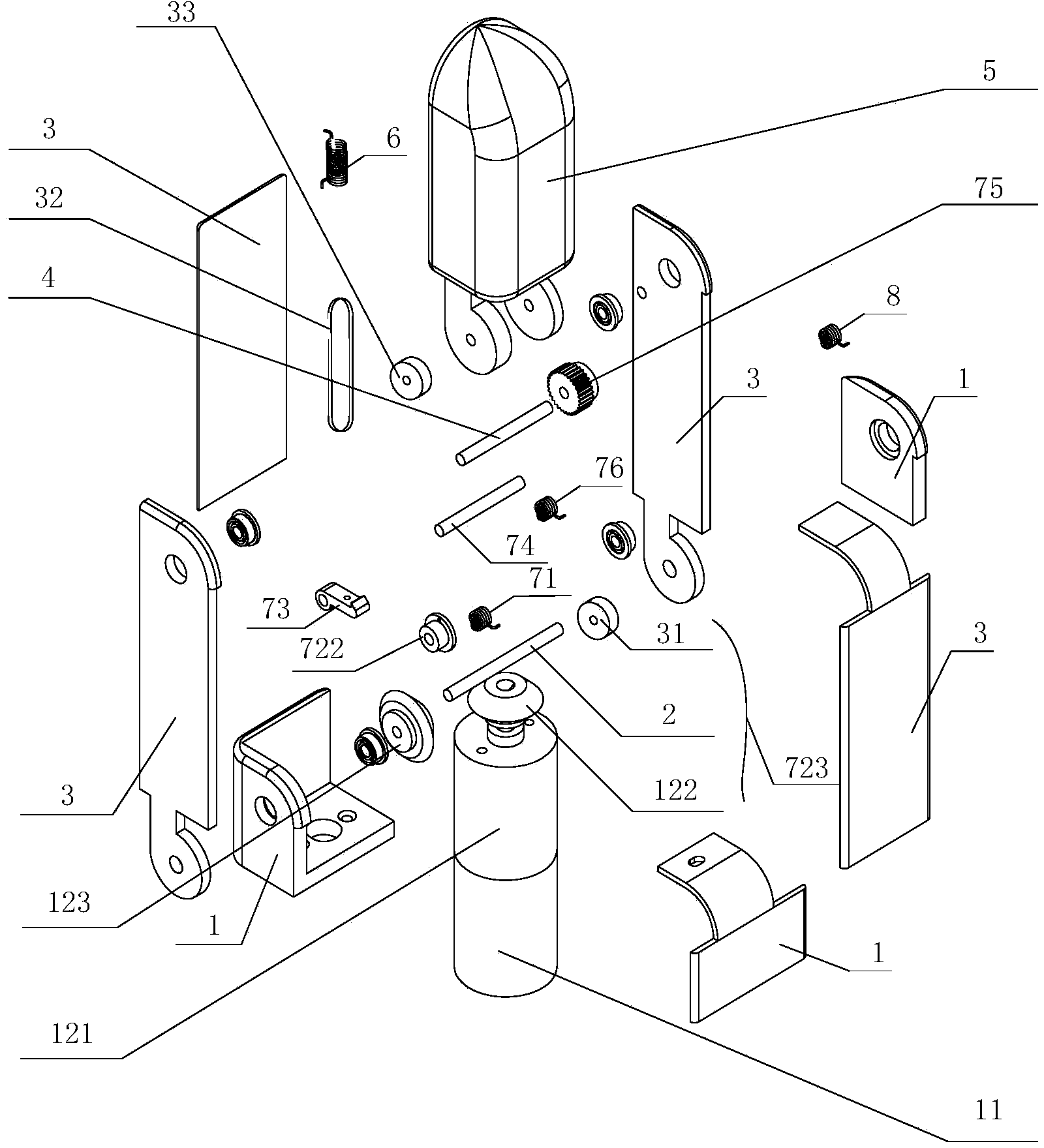
[0031] An embodiment of a grasping and locking adaptive robot finger device designed by the present invention, such as figure 1 , figure 2 , image 3 , Figure 4 with Figure 5 As shown, it includes base 1, motor 11, first transmission mechanism 12, proximal joint shaft 2, middle finger segment 3, driving pulley 31, timing belt 32, driven pulley 33, distal joint shaft 4, and terminal finger segment 5 and the first spring member 6; the motor 11 is fixedly connected to the base 1, the output shaft of the motor 11 is connected to the input shaft of the first transmission mechanism 12, and the output shaft of the first transmission mechanism 12 is connected to the proximal joint shaft 2, The proximal joint shaft 2 is movably sleeved in the base 1, the distal joint shaft 4 is movably sleeved in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More