

Maneuvering target tracking method based on variable structure multiple models
A maneuvering target tracking and maneuvering target technology, applied in the field of maneuvering target tracking, can solve the problems of large amount of computation and complex implementation, and achieve the effects of reducing the amount of computation, improving timeliness, and improving target tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
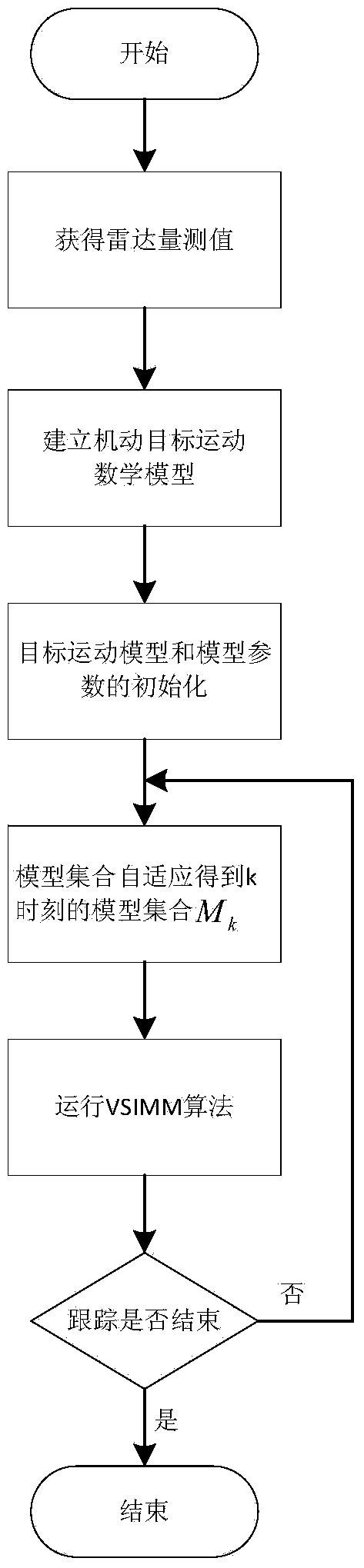
[0039] refer to figure 1 , the concrete steps of the present invention are as follows:
[0040] Step 1, obtain the radar measurement value.
[0041] The status information of the maneuvering target is detected by the radar, that is, the position information, and it is sampled N times with T as the sampling interval to obtain a measurement value sequence {z k}, k=1,2,3...N.
[0042]Step 2, establishing a mathematical model for maneuvering target tracking.
[0043] Based on the fact that the state change process of the maneuvering target is a stochastic process, the target tracking problem can be modeled as a discrete-time stochastic hybrid system. The state equation and measurement equation of the hybrid system are as follows:
[0044] x k = F k x k - 1 + G k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More