

Pneumatic-muscled bionic joint based on universal-joint parallel mechanism
A universal joint, pneumatic muscle technology, applied in the field of robotics and human bionics, can solve problems such as high cost and bulky, and achieve the effect of simple structure, enhanced effect, and enlarged range of pose adjustment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and provides a detailed implementation manner and a specific operation process, but the protection scope of the present invention is not limited to the following implementation. example.
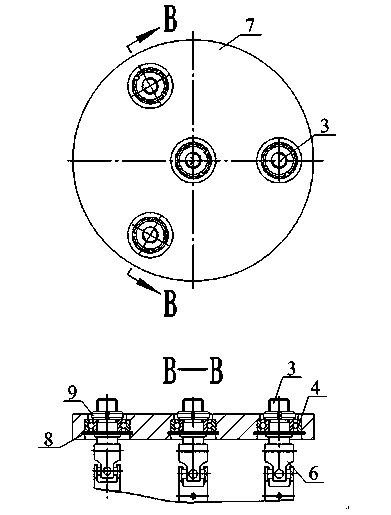
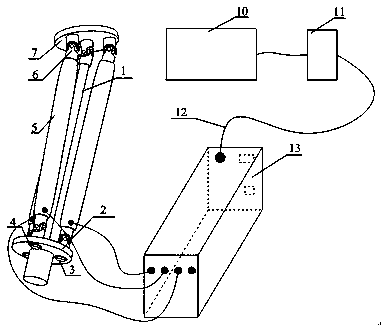
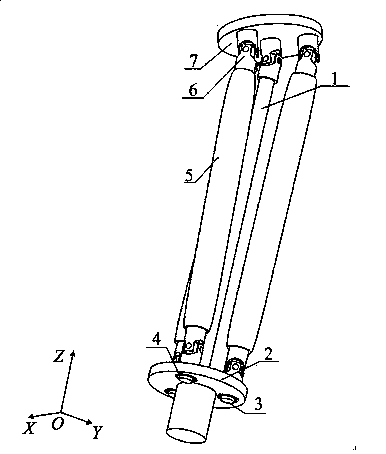
[0019] from figure 1 , 2, 3, the bionic joint is mainly composed of four parts: the fixed end platform 2, the forearm platform 7, the pneumatic muscle 5 and the support rod 1.
[0020] from figure 1 , as shown in 2 and 3, six universal joints 6, three of which are connected to the fixed end platform 2 through the pin hole end of the connecting shaft 3, and the remaining three are connected to the forearm platform 7 through the pin hole end of the connecting shaft 3 . The installation method of the connecting shaft 3 is: process three 120° evenly distributed stepped holes on the two platforms respectively, install t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More