

A kind of ttcan bus time synchronization and method for sending data
A CAN bus and data transmission technology, applied in the field of TTCAN bus time synchronization and data transmission, can solve the problems of inaccurate timing and confusion of program logic, and achieve the effect of reducing the number of interrupts and avoiding system logic confusion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
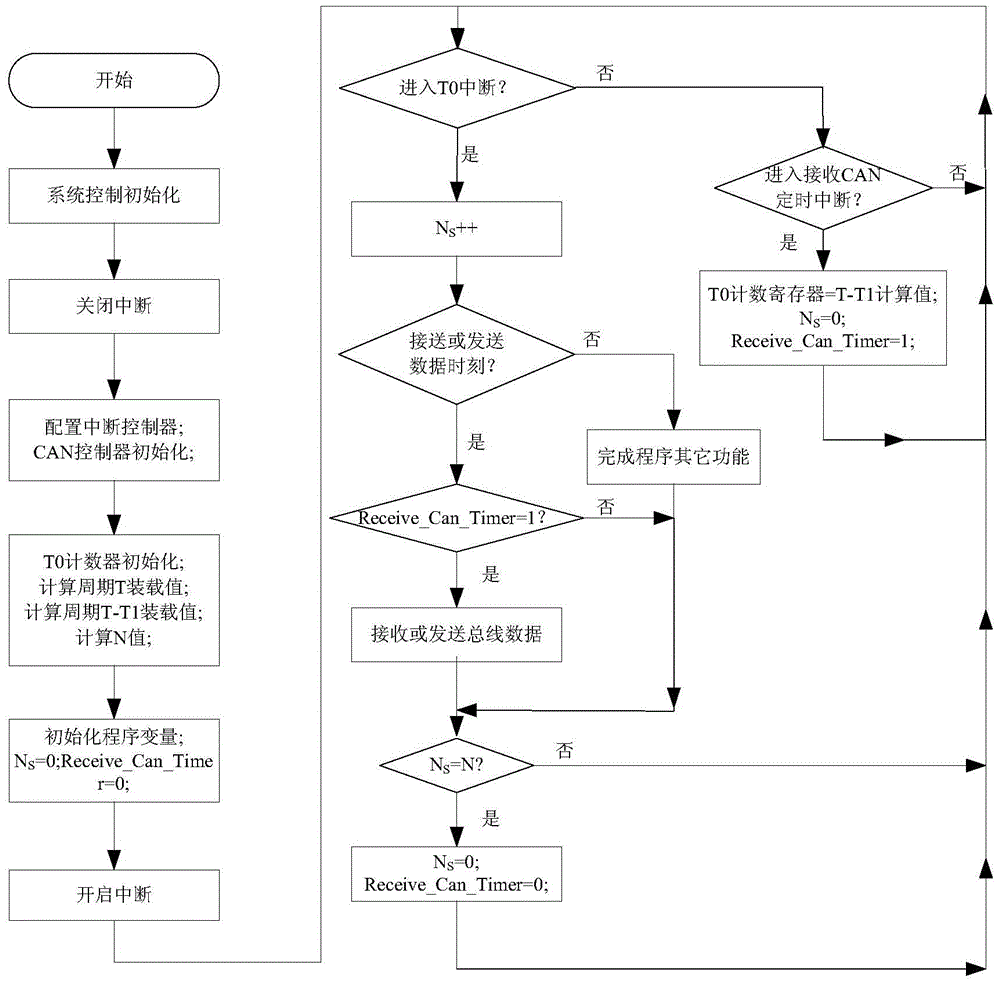
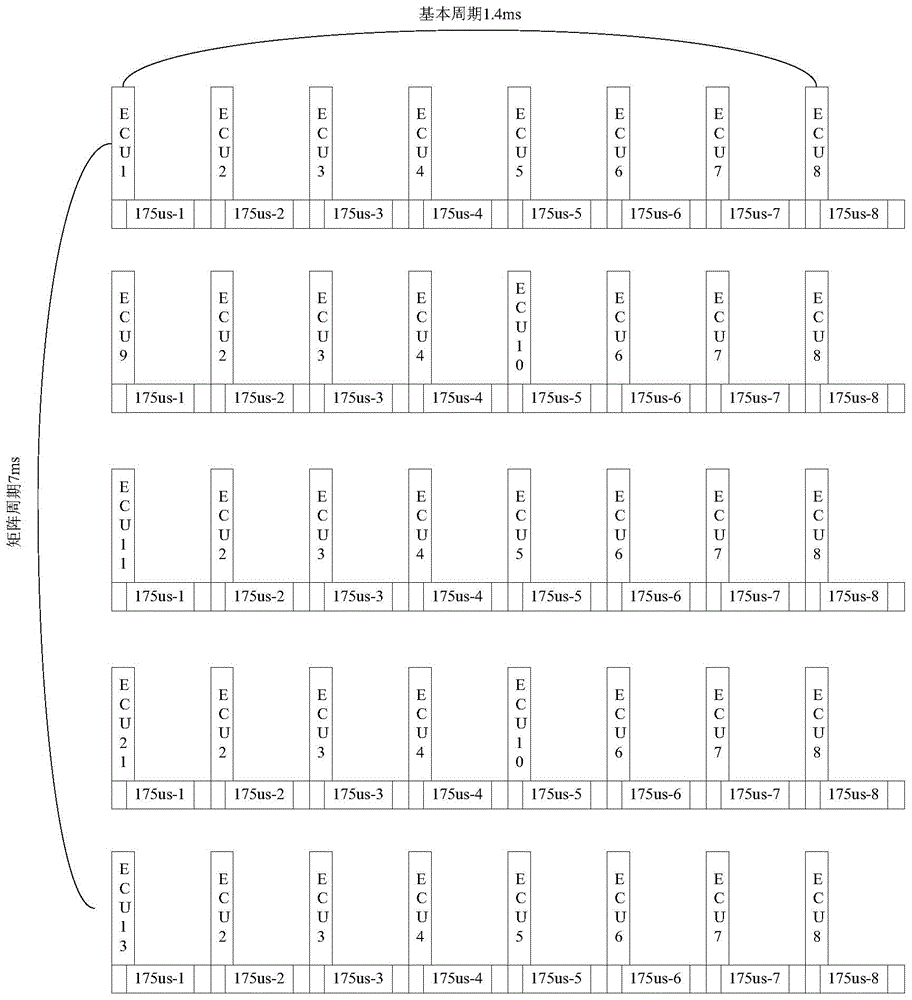
[0046] This embodiment provides a matrix cycle of the TTCAN bus applied to a certain vehicle such as figure 2 As shown, the baud rate of the CAN bus is 1M, and the standard frame data format of 6 bytes. A time slice occupies 175us, a basic cycle consists of 8 time slices, and a matrix cycle consists of 5 basic cycles, so a matrix cycle takes 7ms. The time master node is ECU1, and the current time slave node is ECU2. The control core of this node is DSPTMS320LF28335, and the internal clock is 150M. The timing period of T0 register initialization is T=175us. It takes T1=110us time to calculate the time of receiving the time synchronization message from the master node ECU1. Then T-T1=65us, N=7ms / 175us=40.
[0047] Such as figure 1 As shown, the working process of the present embodiment is as follows:
[0048] 1. Initialize the DSP system control;
[0049] 2. Turn off all interrupts;
[0050] 3. Configure the DSP to interrupt T0 and Receive_can; initialize the CAN contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More