

Multi-sensor attitude fusion method based on complementary reconstruction technology
A multi-sensor, fusion method technology, applied in the field of inertial navigation, can solve the problems of inability to correct four-element calculation results, limited long-term navigation accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment example
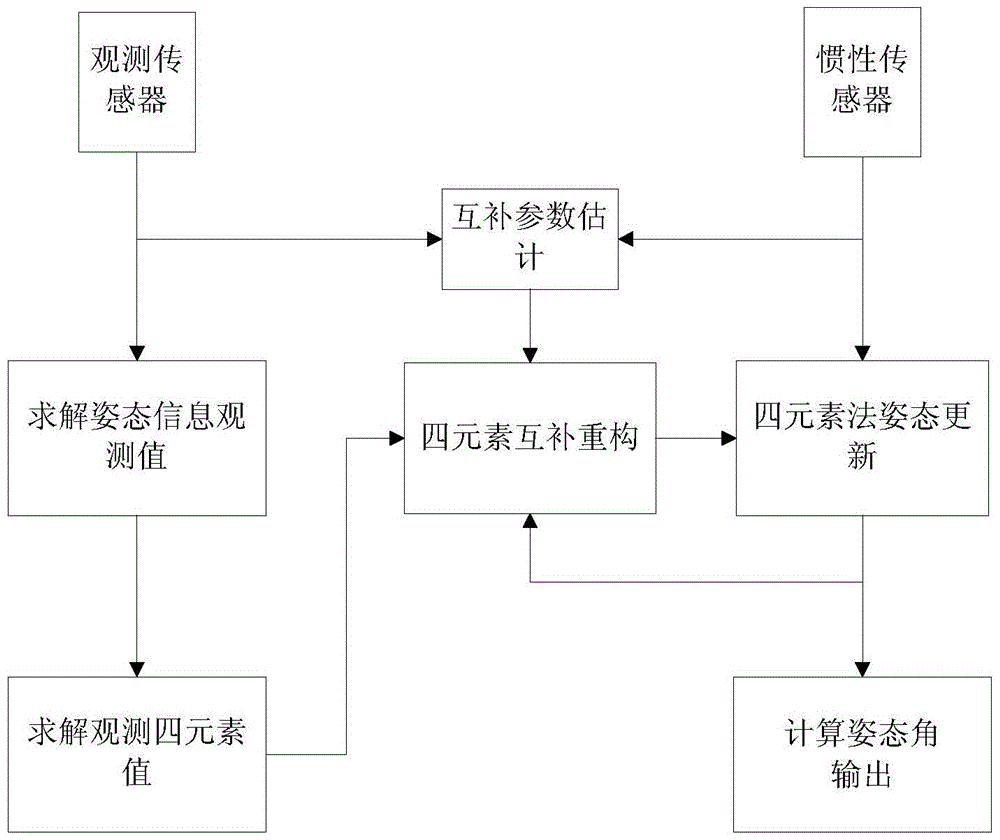
[0062] A multi-sensor attitude fusion method based on complementary reconstruction technology, the specific implementation steps are as follows:
[0063] 1) Calculate the attitude information of the carrier; use the data of the gyroscope sensor to calculate the four-element iterative update matrix M'[q(h)] according to the rotation vector algorithm, and according to the following formula:
[0064] Q(t k )=M'[q(h)]·Q'(t k-1 ) (13)
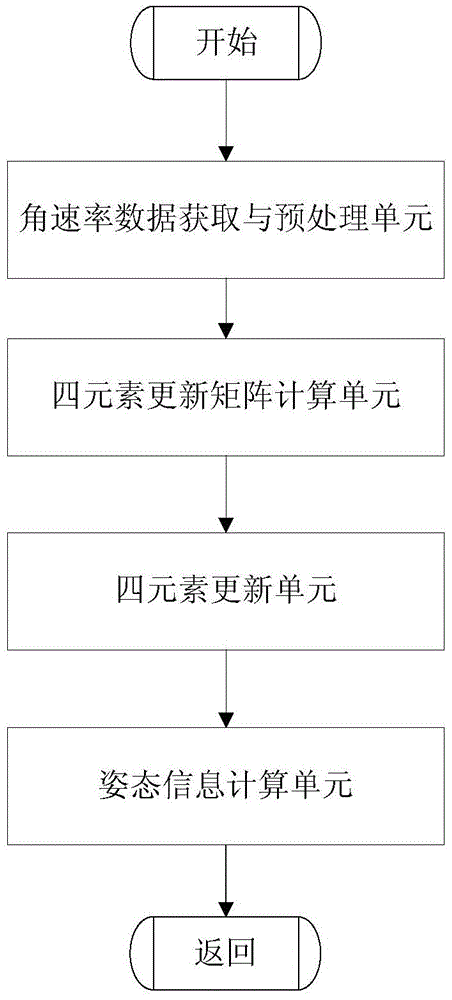
[0065] Update the four-element value Q(t k ), where Q(t k ) is the four-element iteration value at the current moment, M'[q(h)] is the four-element update matrix, Q'(t k-1 ) is the reconstructed value of the four elements at the last moment; and the value Q(t) is calculated according to the updated four elements k ) to calculate the attitude information of the carrier, which are the heading angle Pitch angle θ and roll angle γ, the specific implementation steps are as follows:
[0066] (1.1) Acquisition and preprocessing of angular rate data...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More