

Compensation method for MEMS (Micro-electromechanical Systems) gyroscopic drifting errors based on accelerometer coupling
A technology of gyro drift and compensation method, applied in the field of inertial navigation, can solve the problems of low attitude calculation accuracy, large drift error, low MEMS gyro accuracy, etc., and achieve the effect of improving attitude calculation accuracy, making significant progress, and reducing drift error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0028] The MEMS gyro drift error compensation method based on the meter coupling provided by the present invention solves the problem that the accuracy of the attitude calculation is low due to the low precision of the MEMS gyro and the large drift error, and cannot satisfy engineering applications.
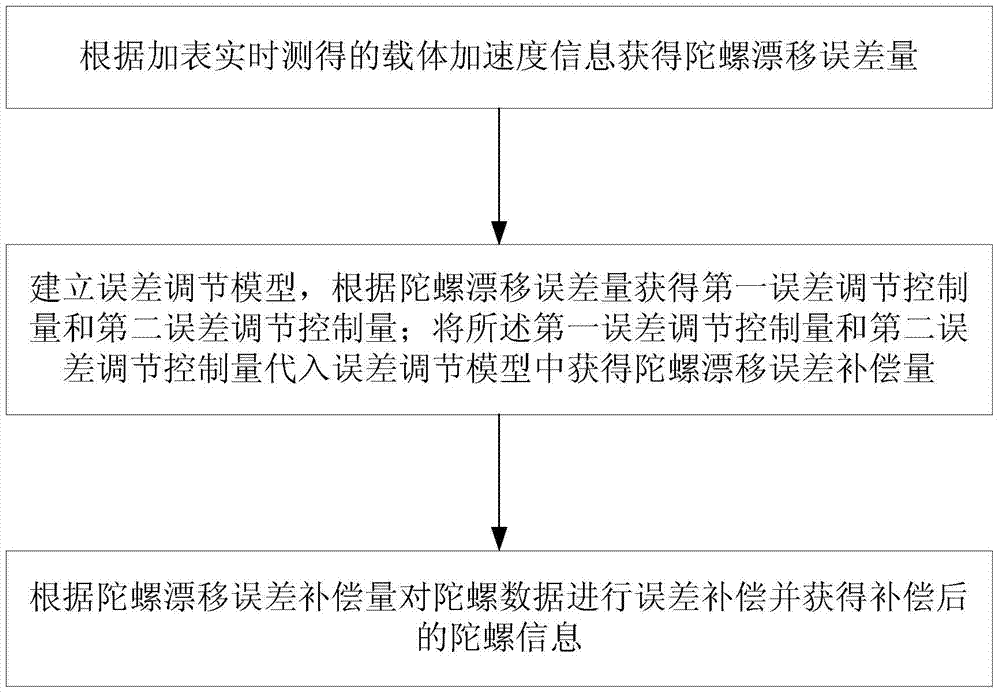
[0029] Such as figure 1 As shown, the compensation method for the MEMS gyro drift error based on the meter coupling provided by the embodiment of the present invention includes the following steps:
[0030] Step 1: Calculate the gyro drift error amount according to the carrier acceleration informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More