

A parallel manipulator with delta structure capable of precise three-dimensional movement
A three-dimensional mobile, manipulator technology, applied in manipulators, manufacturing tools, etc., can solve the problems of narrow industrial manipulator market, insufficient awareness of domestic users, hindering the development of industrial automation, etc., to improve industrial production efficiency, improve the narrow range of motion, The effect of the installation structure is large
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with specific examples.
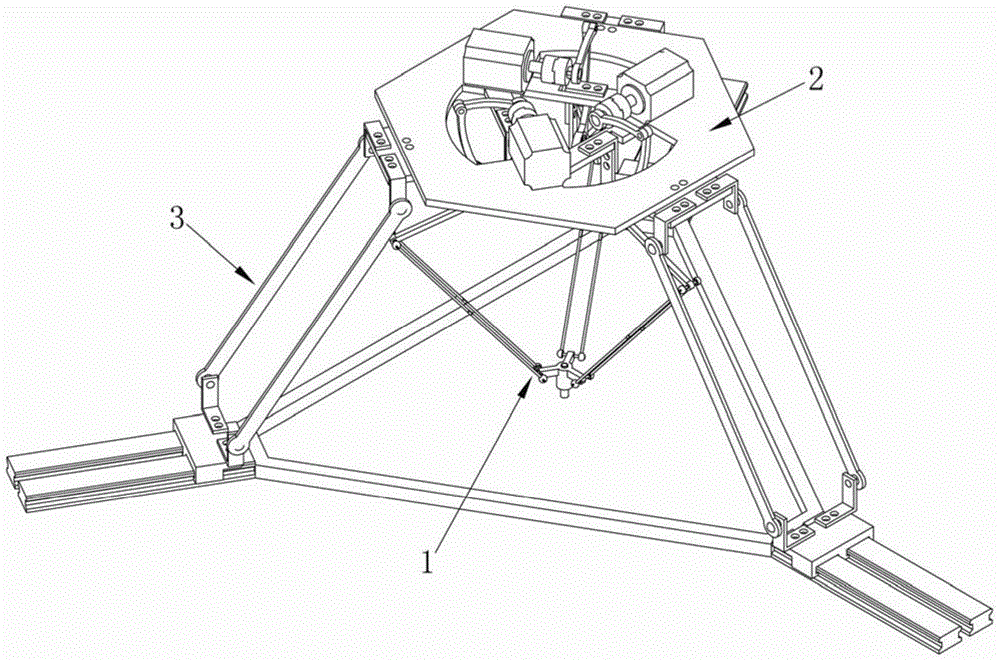
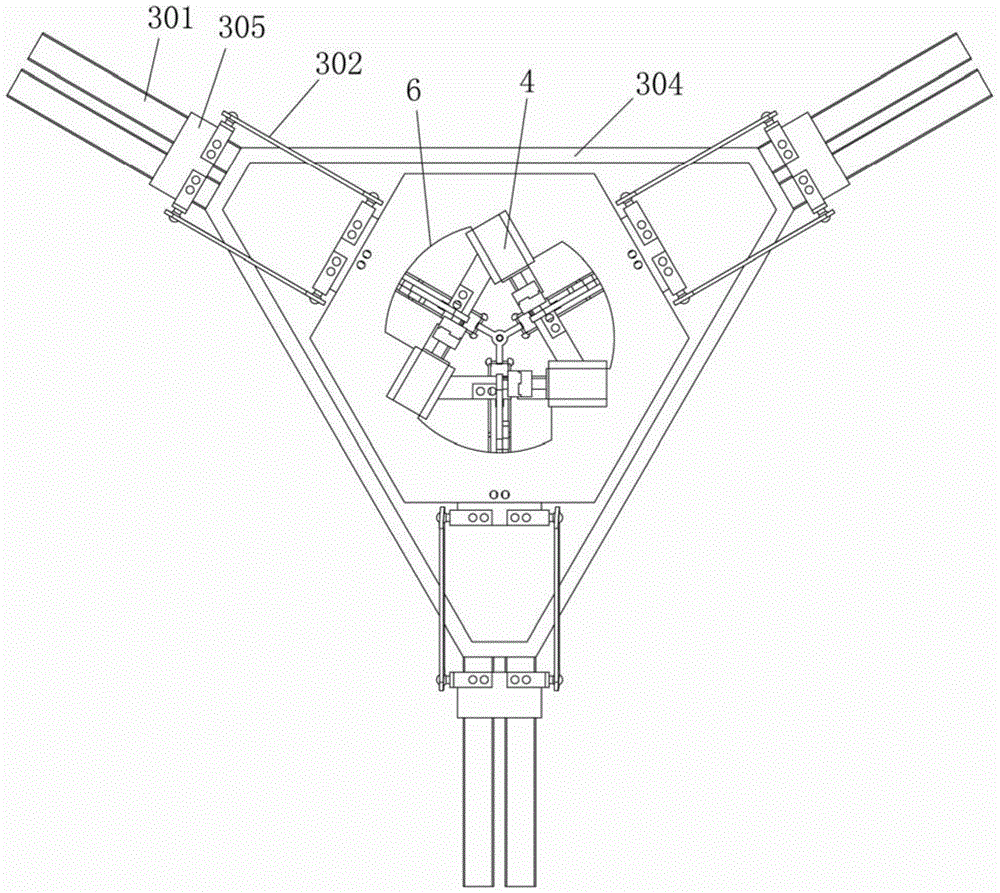
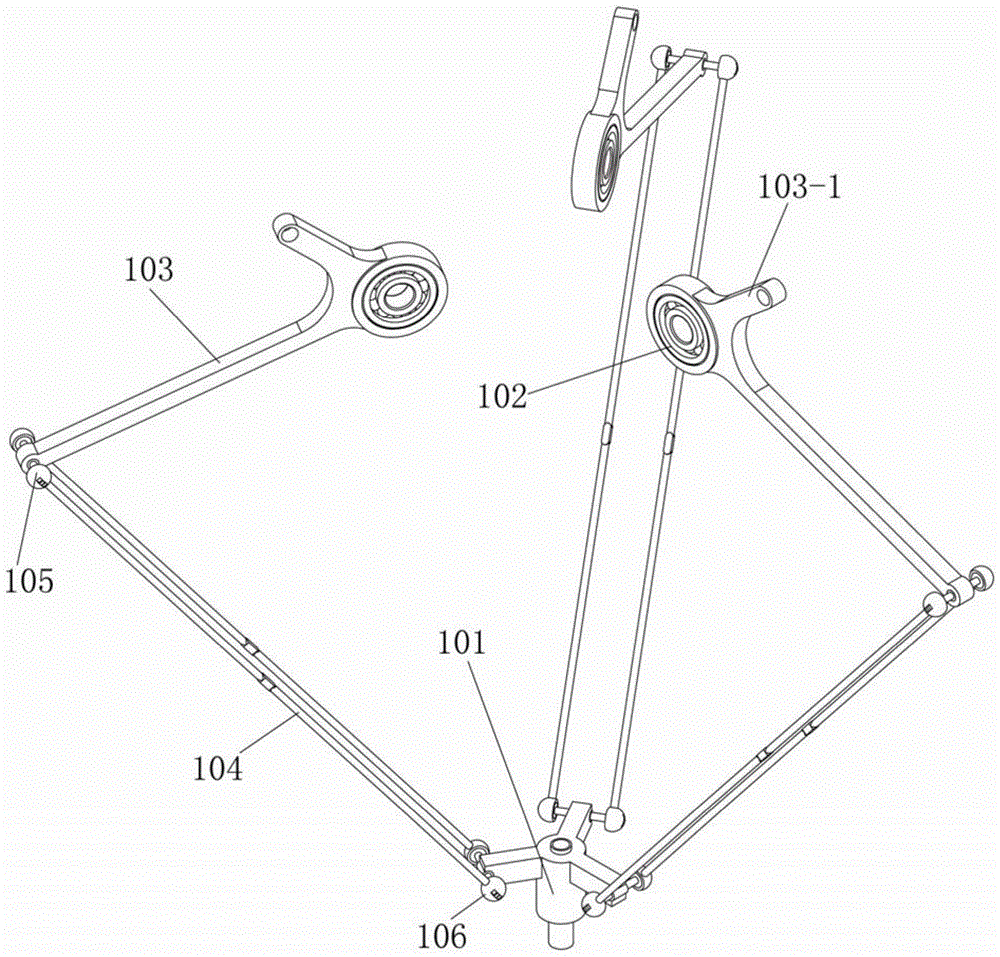
[0024] Such as Figure 1 to Figure 5 As shown, the Delta-structure parallel manipulator described in this embodiment that can move precisely in three dimensions includes a Delta-type parallel manipulator body 1 based on a 3-RUU kinematic chain, a main platform carrying a main platform 2, and a main platform based on a 3-PUU kinematic chain Bracket 3, wherein, the Delta type parallel mechanical handpiece body 1 is mounted on the carrying main platform 2, and is driven by a high-precision servo motor 4 on the carrying main platform 2 through a transmission four-bar mechanism 5; the carrying main platform 2 (that is, the first-level moving platform) is supported by the main platform support 3 based on the 3-PUU kinematic chain. Through the verification of the spiral theory of degrees of freedom, it has three translational degrees of freedom in space, and can be lifted up and down...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More