

Kalman filtering method for recursive estimation under condition that observation noise covariance matrix is unknown
A technique for Kalman filtering and noise observation, applied in impedance networks, adaptive networks, electrical components, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
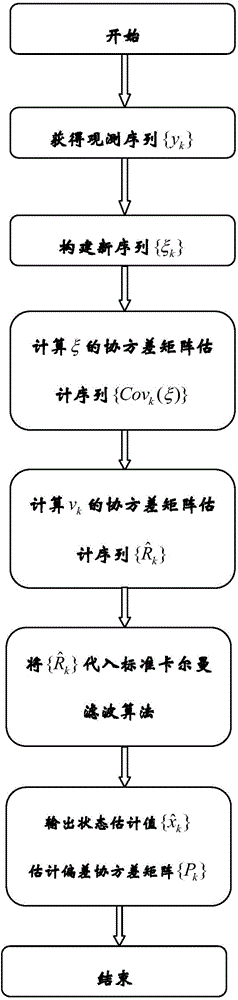
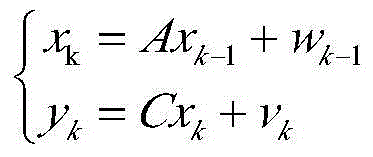
[0041] The present invention is aimed at the discrete-time linear time-invariant system model, and when the system observation noise covariance matrix is completely unknown, a new statistical sequence can be constructed from the system observation sequence, and the recursive calculation covariance matrix estimation based on the law of large numbers can be used. The method calculates the covariance matrix estimation sequence of the newly constructed sequence in real time, calculates the estimated sequence of the covariance matrix of the observation noise through the relationship between the covariance matrix of the construction sequence and the covariance matrix of the observation noise, and then uses the real-time estimation of the covariance matrix of the observation noise The real-time observation noise covariance matrix is substituted into the standard Kalman filter method to recursively calculate the real-time estimation of the system state and the covariance matrix of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More