

Portable mining intrinsically safe detection robot body based on parallel kinematic mechanism control
A robot body and motion mechanism technology, applied in the field of rescue and detection robots, can solve the problems of poor obstacle-crossing ability and weak drive wheel power, and achieve the effect of simple walking control design, low inductance, and improved obstacle-breaking ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
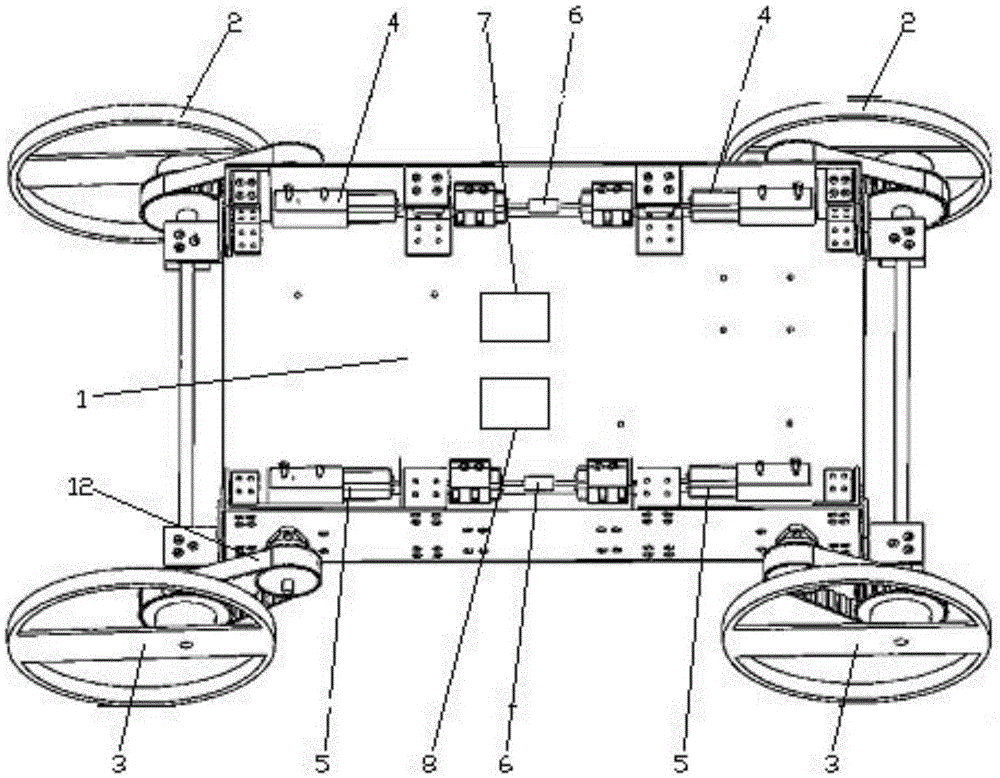
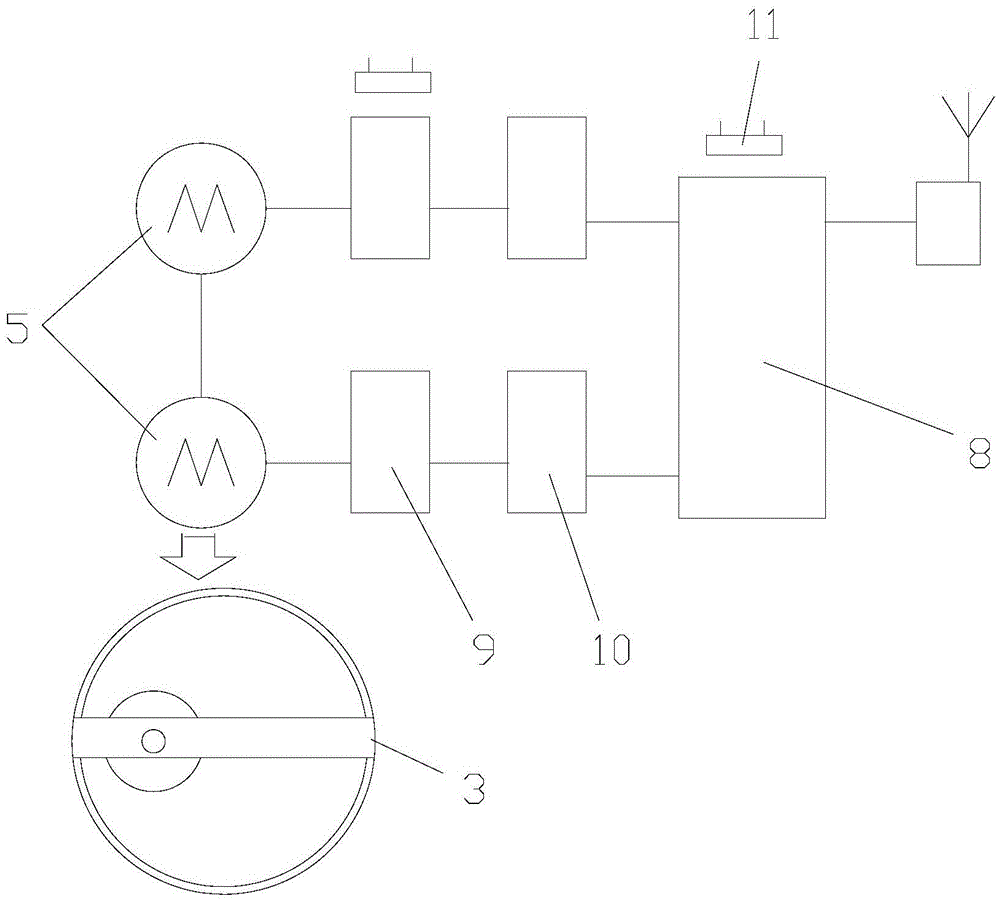
[0020] As shown in the figure, this embodiment is based on the body of the portable mine intrinsically safe detection robot controlled by a parallel kinematic mechanism, including a body 1, the left side of the body 1 is provided with a first walking wheel set 2, and the right side of the body 1 is A second road wheel set 3 is provided; the body 1 is also provided with a first motor group 4 driving the first road wheel group 2 and a second motor group 5 driving the second road wheel group 3, the first electric motor Both the unit 4 and the second motor unit 5 include two motors whose rotors are coaxial and connected in series.
[0021] Of course, in actual implementation, the number of motors included in the first motor unit 4 and the second motor unit 5 can also be increased and adjusted as required, but the number of them must be more than two. In th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More