

Method for obtaining encoder scale graduation error
A technology of scale scale and scale error, applied in the direction of instruments, etc., can solve the problem of high cost of scale scale error on the encoder
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0058] In this embodiment, the encoder for measuring the rotation angle of the gantry in the CT equipment is taken as an example for illustration. The encoder may be a magnetic grid encoder or a grating encoder, and the frame is a rotating part in the CT equipment, and the CT equipment scans the patient through the rotation of the frame. In other embodiments, the encoder can also be used to measure the displacement of other equipment, such as elevators, servo motors, machine tools, and the like.
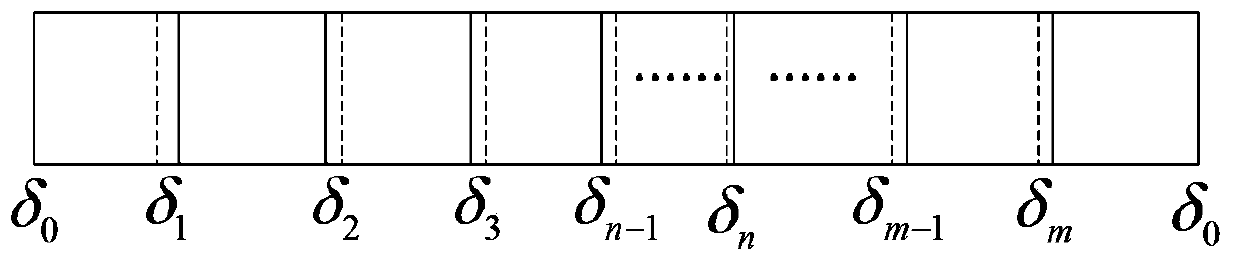
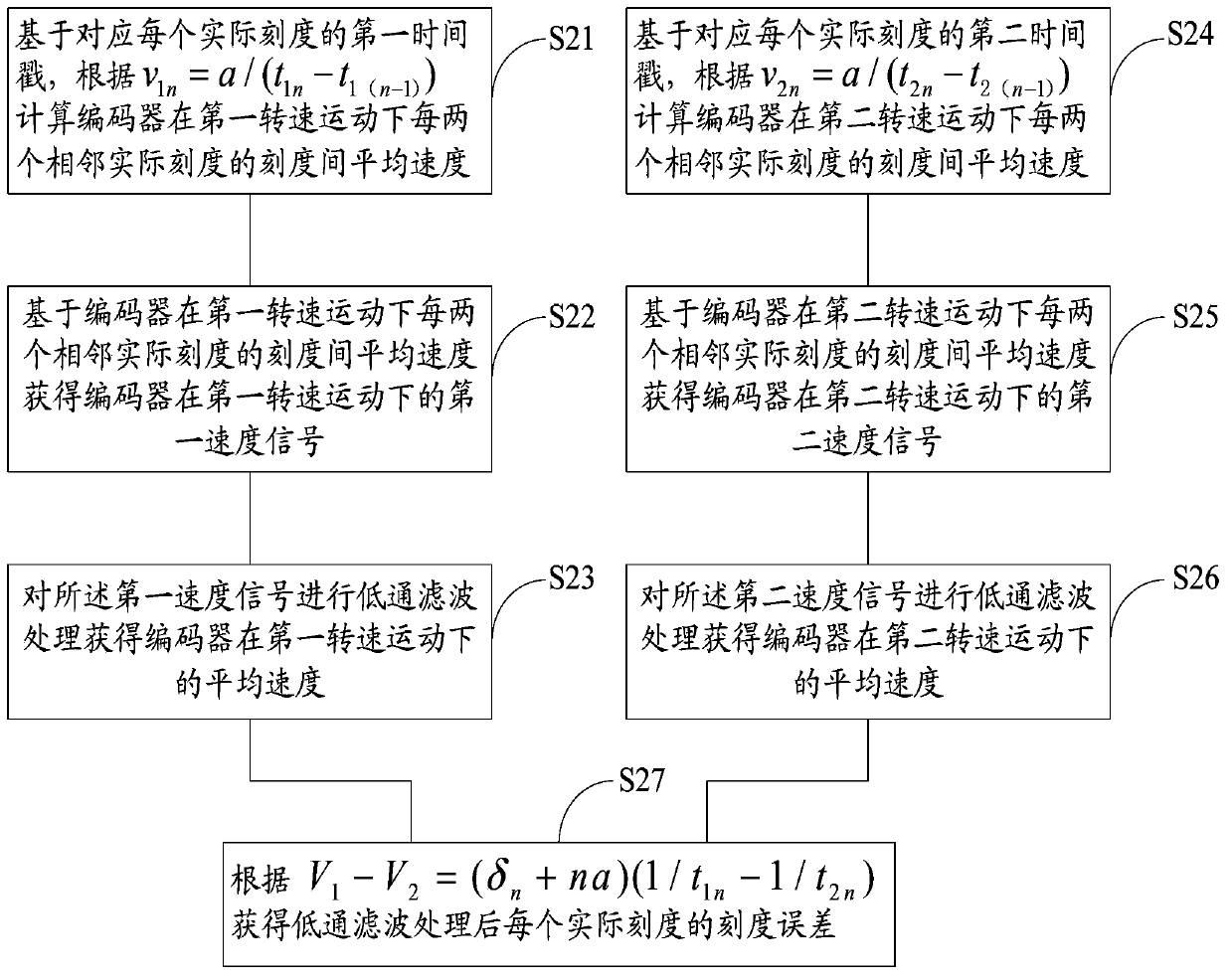
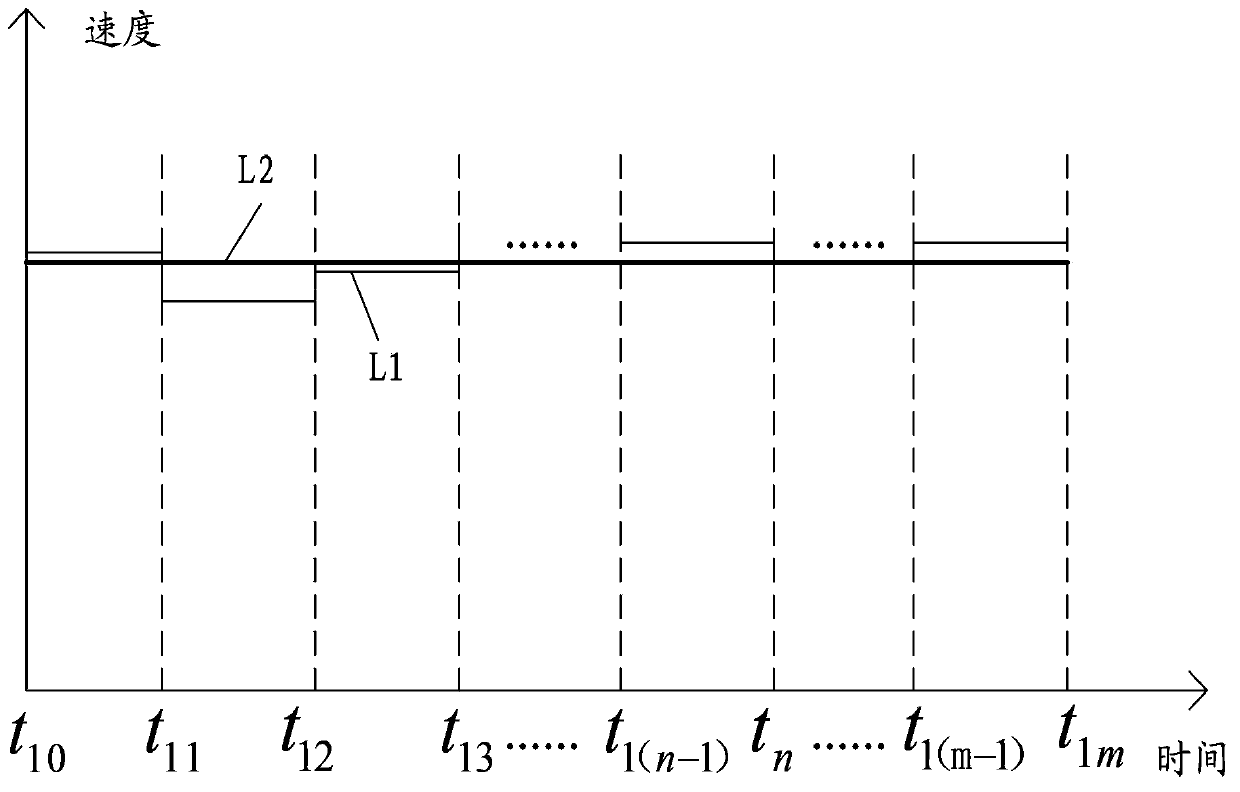
[0059] As described in step S21 , based on the first time stamp corresponding to each actual scale, the average speed between scales of every two adjacent actual scales of the encoder under the first rotational speed movement is calculated.
[0060] Specifically, in this embodiment, the encoder is used to measure the rotation angle of the gantry in the CT equipment, and rotate the gantry under the first torque so that the gantry rotates stably at a speed not exceeding the design rota...
Embodiment 2
[0105] For some systems that require higher error precision, the technical solution of the present invention provides the second embodiment. The difference between Embodiment 2 and Embodiment 1 is that it also includes repeating the scale error update step until the scale error meets the accuracy requirements; the same parts of Embodiment 2 and Embodiment 1 will not be repeated, and the following will focus on the different parts of the two. .
[0106] Updating the scale error of the encoder scale includes: based on the first time stamp corresponding to each actual scale, according to v 1n '=(δ n -δ n-1 +a) / (t 1n -t 1(n-1) ) Calculate the average speed between the scales of every two adjacent actual scales of the encoder under the first rotational speed movement after updating, v 1n ' is the average speed between the nth actual scale and the n-1th actual scale of the encoder under the first rotational speed movement after updating;
[0107] Obtaining the first speed sign...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More