

Pedestrian navigation method based on relative pose measurement
A relative pose and pedestrian navigation technology, applied in the field of navigation and positioning, can solve problems such as error accumulation, loss of navigation and positioning, failure to meet pedestrian navigation accuracy requirements, etc., and achieve the effect of accurate extraction and high-precision positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
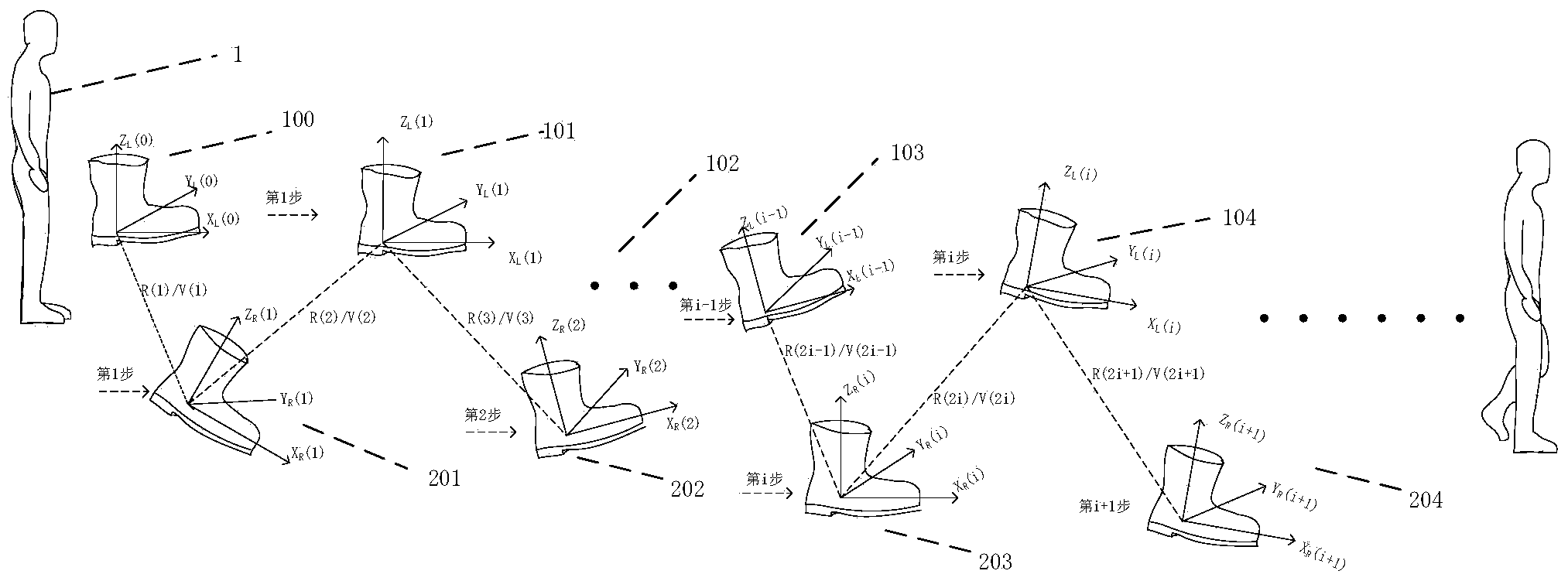
[0022] figure 1 It is the schematic diagram of pedestrian navigation method based on relative position and attitude measurement. As shown in the figure, construct the left foot coordinate system O on the left foot and right foot of pedestrian 1 respectively L -X L Y L Z L and the right foot coordinate system O R -X R Y R Z R , record the coordinate system O of the pedestrian's left foot 100 before the pedestrian takes the first step L (0)-X L (0)Y L (0)Z L (0); when the left foot stops stably on the ground, the right foot takes the first step and lands 201, start the first relative pose measurement, and measure the coordinate system O of the right foot R (1)-X R (1)Y R (1)Z R (1) Relative to the left foot coordinate system O L (0)-X L (0)Y L (0)Z L The relative position V(1) and relative posture R(1) of (0), and then when...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More