Centralized multi-sensor formation targets tracking method based on template matching
A template matching and target tracking technology, applied in the field of information fusion systems, can solve the problem of not considering the accurate tracking of targets in the formation, lack of literature, etc., to avoid redundant tracks, eliminate clutter, and ensure stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
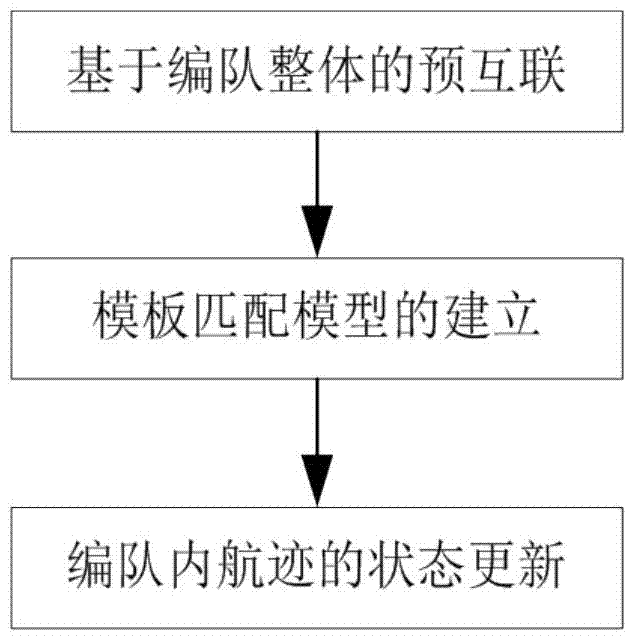
[0017] The specific steps in the technical solution will be described in detail below in conjunction with the accompanying drawings.
[0018] 1. Pre-interconnection based on the formation as a whole
[0019] Let G(k-1) be the set of update value of formation track state and covariance update value at time k-1,
[0020] G ( k - 1 ) = { X n t ( k - 1 ) , P n t ( k - 1 ) } t = 1 , . . . , T g ( k - 1 ) ; n = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



