

Multi-method fusion based Kalman filtering quantization method
A Kalman filter and multi-method technology, applied in the field of target tracking of linear systems, can solve the problems of poor robustness, inability to estimate the unknown variance of measurement noise, etc., and achieve the effect of strong tracking ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
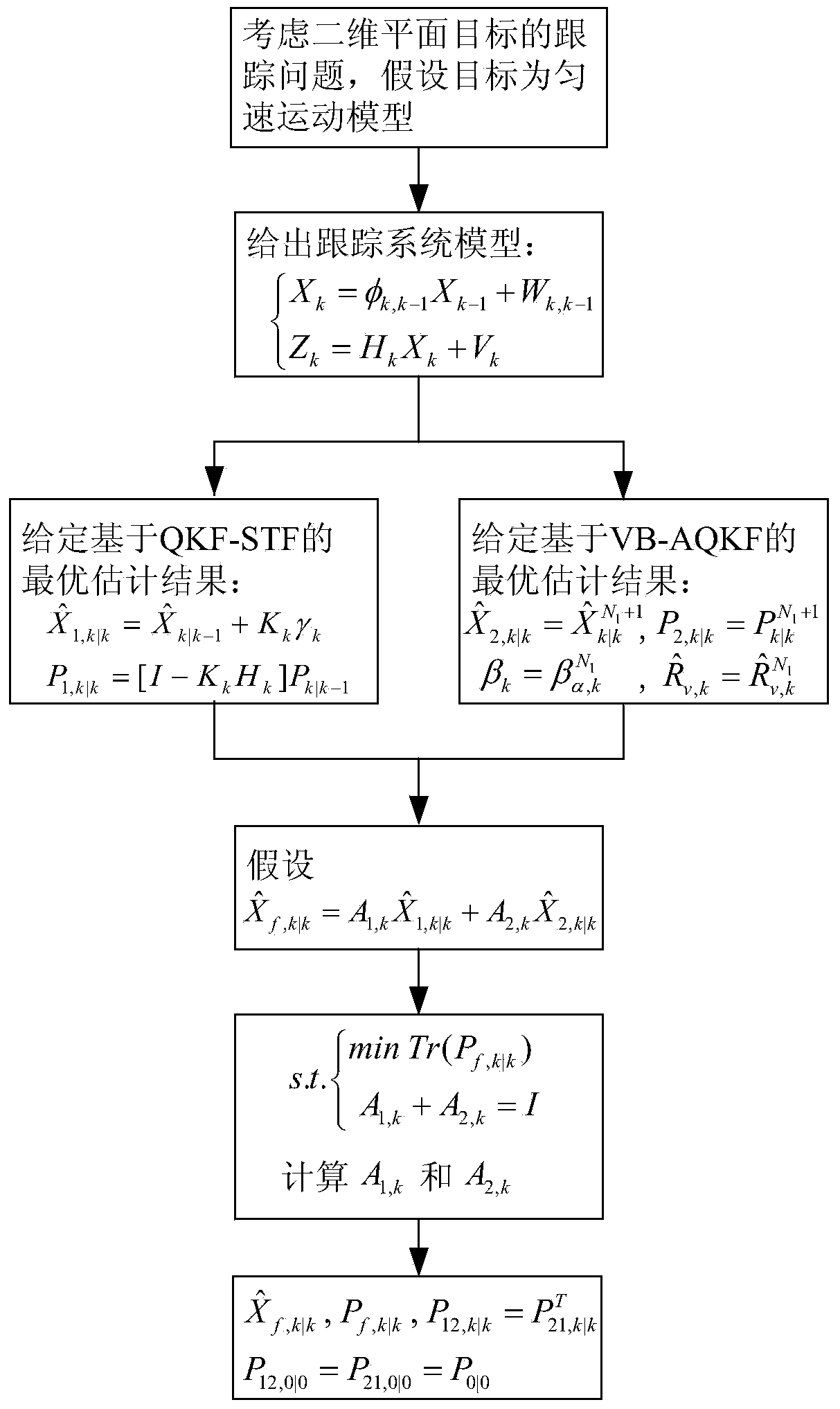
[0008] In the following, we first establish a model for the motion state of the tracking target, and then give the estimation results of the quantized Kalman filter based on strong tracking and the adaptive quantized Kalman filter based on variational Bayesian, and finally give the quantized Kalman filter based on multi-method fusion. Mann filtering method to estimate motion state and realize target tracking. The implementation process of the present invention will be described in detail below.
[0009] Step 1. System Modeling
[0010] Considering the tracking problem of a two-dimensional planar target, assuming that the target is a uniform motion model, the tracking system model is given as follows
[0011] X k = φ k , k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More