

Portable multi-mode controlled hand function rehabilitation training device
A rehabilitation training, multi-modal technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problem that the amount of training cannot meet the best rehabilitation needs of patients.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
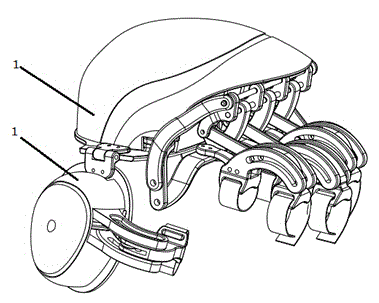
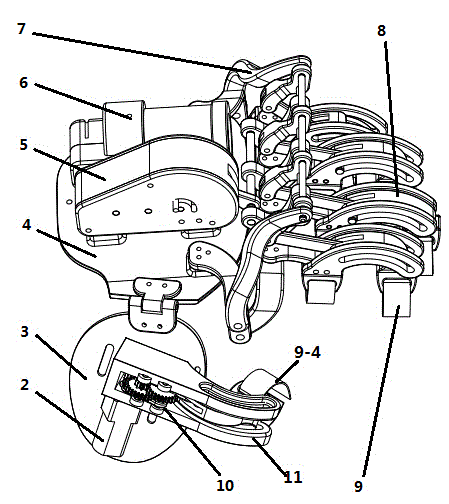
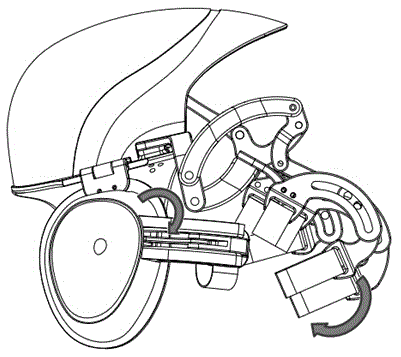
[0030] Such as figure 1 , shown in 2, a portable multi-mode control hand function rehabilitation training device, including a shell 1, a thumb plate 3, a palm plate 4, a four-finger drive mechanism 6, a thumb drive mechanism 2, a four-finger deceleration mechanism 5, and a thumb deceleration mechanism 10 , connecting rod mechanism 7, arc chute mechanism 8, self-adaptive finger adjustment mechanism 9. Wherein, between the shell 1 and the thumb plate 3 and the palm plate 4, threaded connection is used, between the four-finger reduction mechanism 5 and the thumb plate 3, the thumb reduction mechanism 10 and the palm plate 3 are threaded, and between the rods of the linkage mechanism 7 Connect with cylindrical pins. The four-finger drive mechanism 6 is connected to the link mechanism 7 through the four-finger reduction mechanism 5, the link mechanism 7 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More