Spherical fruit and vegetable picking end effector
An end-effector, fruit and vegetable technology, applied in picking machines, agricultural machinery and implements, agriculture, etc., can solve problems such as fruit and vegetable damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
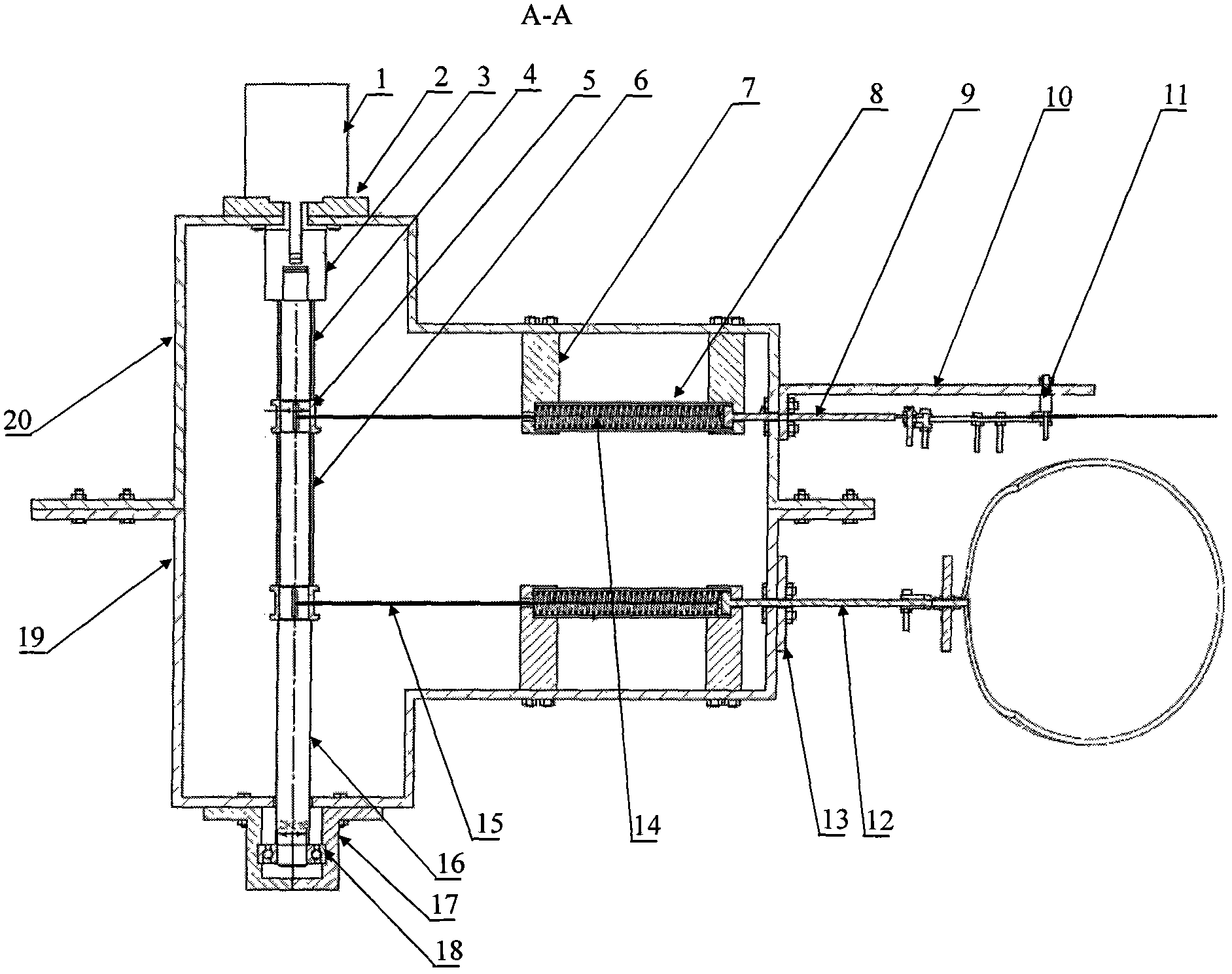
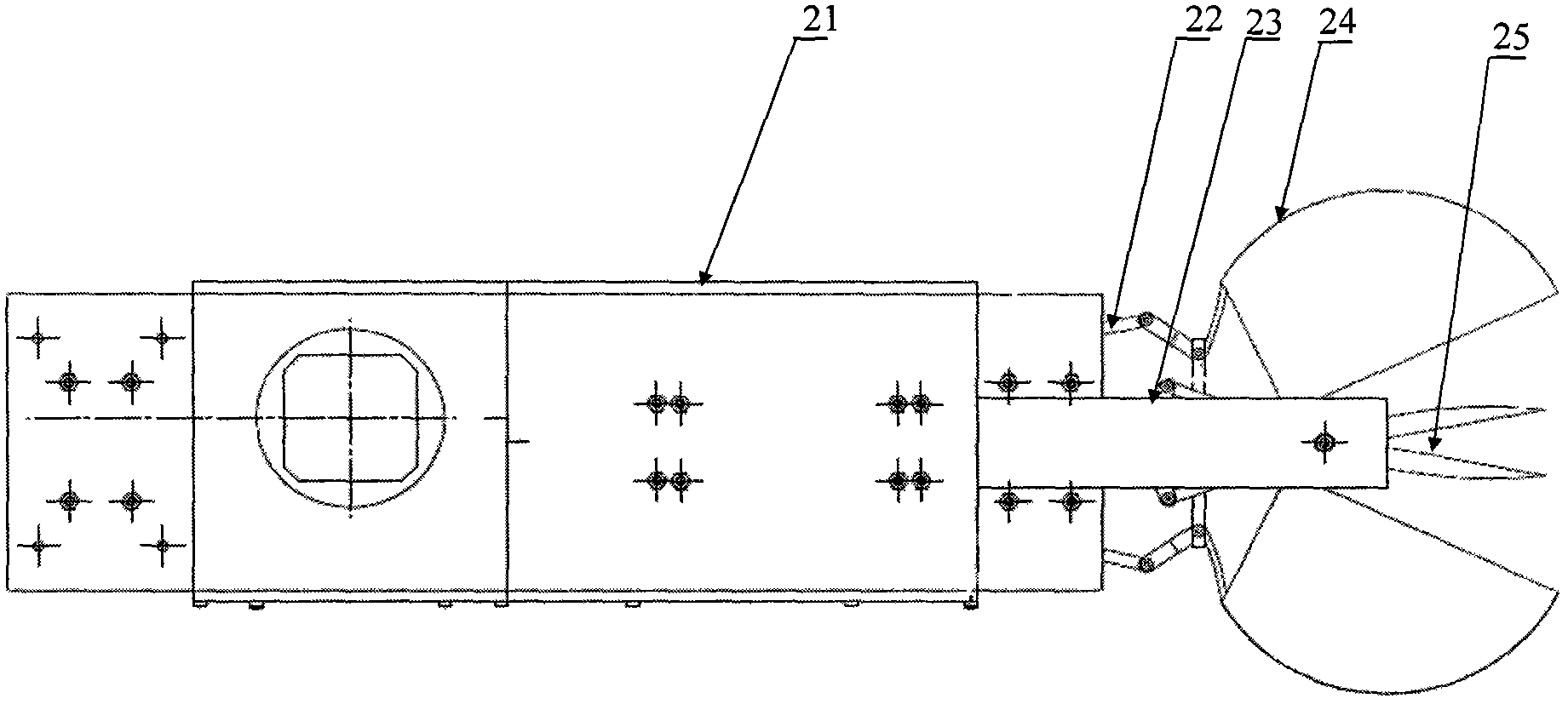
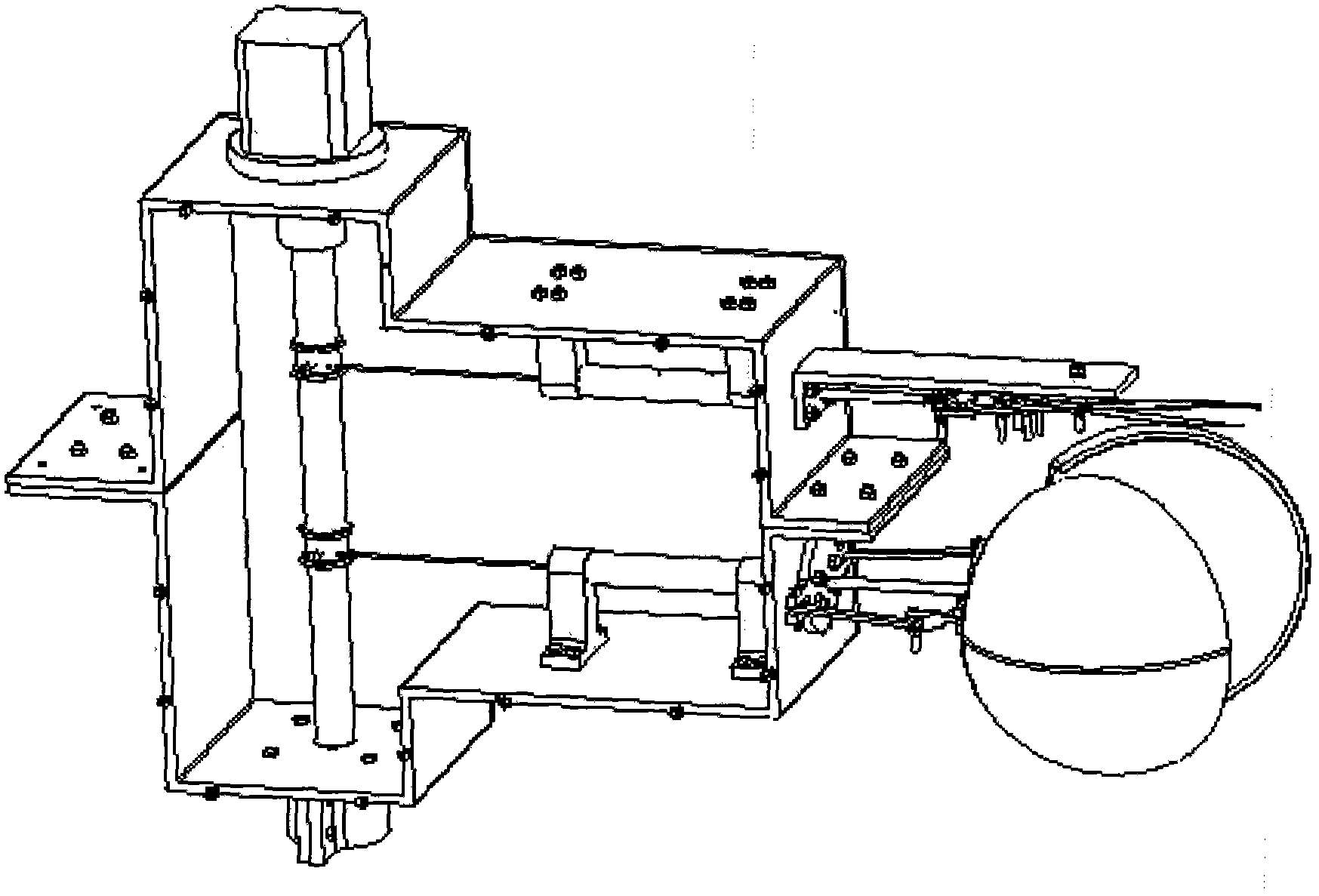
[0016] Such as Figure 1-6 As shown, the embodiment of the present invention consists of a frame, a drive transmission mechanism, a guide sleeve mechanism, a cutting mechanism, and a grasping mechanism.
[0017] Frame is connected by screw by upper support 20, lower support 19, support side plate 21 (two).
[0018] The drive transmission mechanism consists of a motor 1, a shaft coupling 3, a transmission shaft 16, an upper sleeve 4, a lower sleeve 6, a capstan 5 (two corresponding to a cutting mechanism and a grabbing mechanism), a rope 15 (two, respectively corresponding cutting mechanism and grasping mechanism), bearing block 17 (consisting of two and a half bearing blocks), bearing 18 form, the rotation of motor 1 is converted into the translation motion of rope 15.
[0019] The guide sleeve mechanism is made up of a guide sleeve 8 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More