

A Robot Autonomous Pathfinding Method Based on Laser Ranging
A laser ranging and robotics technology, applied in two-dimensional position/channel control and other directions, can solve the problems of not finding a drivable direction, unsatisfactory instantaneous target points, etc., to avoid collision with obstacles, strong adaptive ability, The effect of high safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
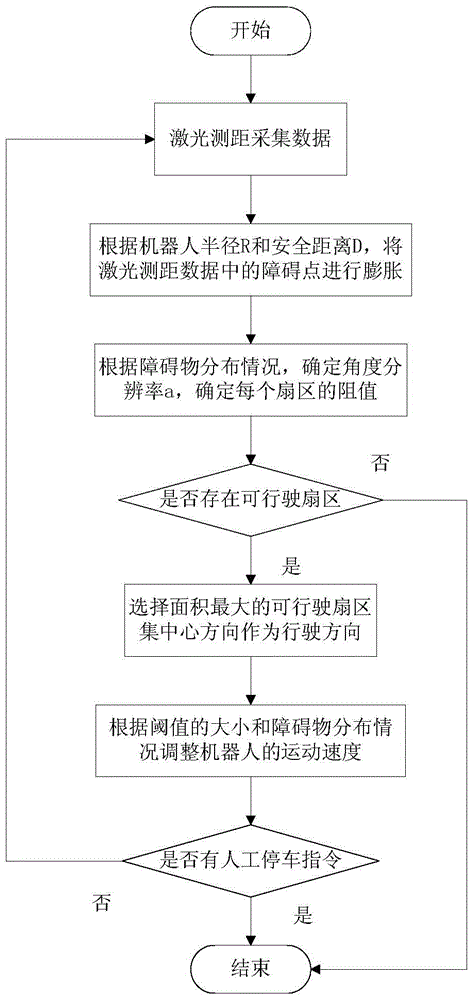
[0031] The technical solution is described with specific examples in conjunction with the accompanying drawings. The present invention is a robot pathfinding method based on laser ranging, as shown in the attached figure 1 Shown, the technical solution that the present invention solves its technical problem adopts is:
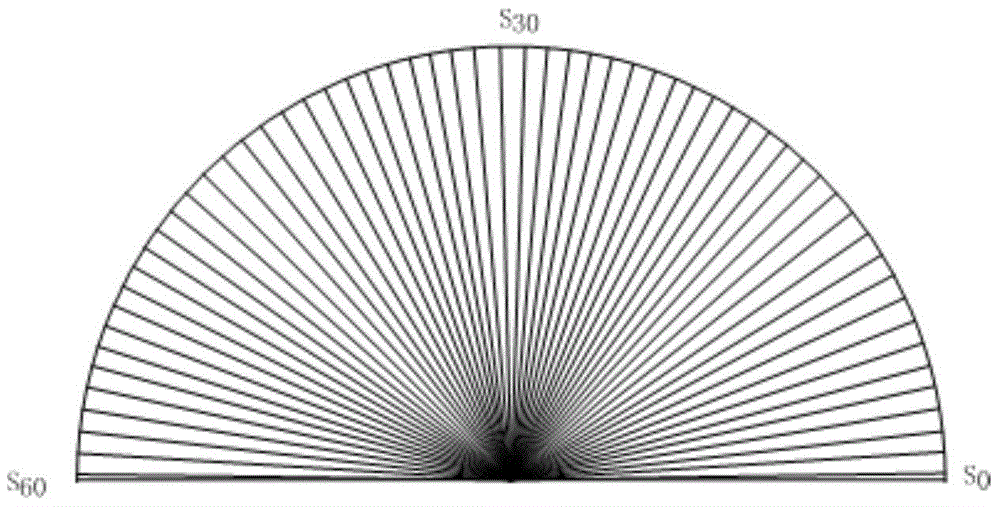
[0032] 10) Establish a polar coordinate system with the geometric center of the robot as the pole, take the vertical robot heading angle to the right as 0 degrees, and the angle increases to 180 degrees in counterclockwise order; the robot's instantaneous movement space is within the range from 0 degrees to 180 degrees , the radius is the maximum detection distance of laser ranging.
[0033]11) Divide the instantaneous motion space of the robot into N=61 sectors according to a certain angular resolution a=3°. Except for the two sectors at the edge, each sector has the same size, and the angular resolution a is related to the number of sectors N The relationshi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More