Anti-collision control method for a cantilever stacker-reclaimer
A control method and reclaimer technology, applied in transportation, packaging, loading/unloading, etc., can solve problems such as collision of two stacker reclaimers, collision accidents of stacker reclaimers, complex algorithms, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
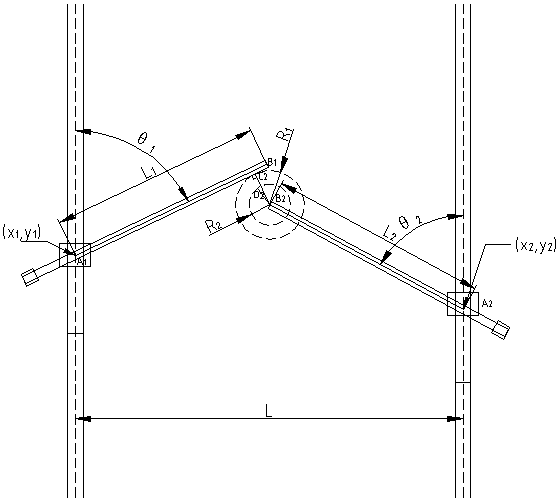
[0148] Simplify the cantilever stacker-reclaimer on the adjacent track in the stockyard, and the simplified projection on the plane is as follows figure 1 with figure 2 shown. The collision between the first cantilever stacker reclaimer and the second cantilever stacker reclaimer on the adjacent track can only be caused by the front end of one of the cantilever stacker reclaimers colliding with the arm frame of the other cantilever stacker reclaimer. Collide. When formula 1 is satisfied: , it is impossible for the two cantilever stackers to collide. when , it can be divided into the following two cases for analysis. When formula 2 is satisfied: when, such as figure 1 As shown, with the cantilever front end B of the second cantilever stacker reclaimer 2 as the center of the circle, R 1 The circle 1 with a radius of 1 is the alarm area of the second cantilever stacker-reclaimer, represented by R 2 Circle 2 with radius 2 is the emergency stop area for the second b...
Embodiment 2
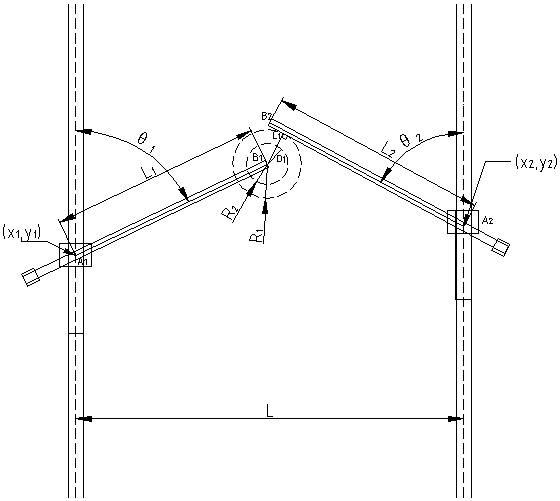
[0176] The projections of the first cantilever stacker-reclaimer and the second cantilever stacker-reclaimer on the horizontal plane are as follows: image 3 shown. The boom of the cantilever stacker-reclaimer is longer, and the sum of the arm lengths of two cantilever stacker-reclaimers on adjacent tracks is greater than the distance between adjacent tracks. Therefore, in normal stacking and reclaiming operations, there is a risk of collision between two cantilever stackers and reclaimers. When two cantilever stackers and reclaimers on adjacent tracks collide, it can only be that the front end of one of the cantilever stackers and reclaimers collides with the boom of another cantilever stacker and reclaimer.
[0177] When formula 11 is satisfied: when, such as image 3 As shown, A 1 , A 2 are the projection points of the center of rotation of the first cantilever stacker-reclaimer and the second cantilever stacker-reclaimer on the horizontal plane; B 1 , B 2 They are ...
Embodiment 3
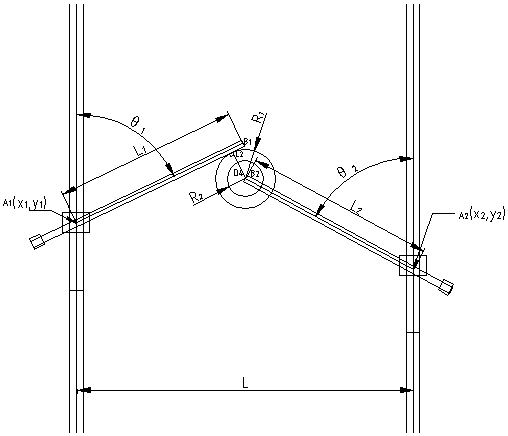
[0205] The projections of the first cantilever stacker-reclaimer and the second cantilever stacker-reclaimer on the horizontal plane are as follows: Figure 5 shown. The boom of the cantilever stacker-reclaimer is longer, and the sum of the arm lengths of two cantilever stacker-reclaimers on adjacent tracks is greater than the distance between adjacent tracks. Therefore, in normal stacking and reclaiming operations, there is a risk of collision between two cantilever stackers and reclaimers. When two cantilever stackers and reclaimers on adjacent tracks collide, it can only be that the front end of one of the cantilever stackers and reclaimers collides with the boom of another cantilever stacker and reclaimer.
[0206] Such as Figure 5 As shown, A 1 is the projection on the horizontal plane of the intersection point of the cantilever and the center of rotation of the first cantilever stacker-reclaimer, and its coordinates are . B 1 It is the projection of the front end...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com