

Night identification method of apple harvesting robot
A technology for picking robots and identification methods, applied in the field of night identification of apple picking robots, to achieve the effect of reducing color rendering and reducing the influence of shadows
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
[0033] Concrete steps of the present invention are:
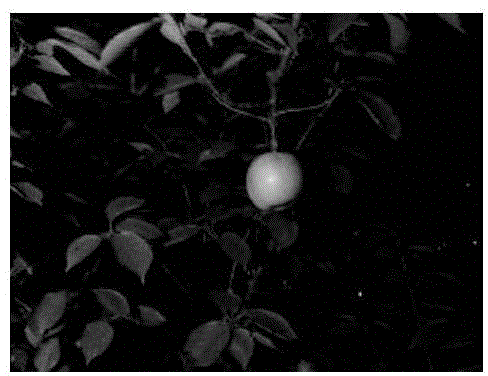
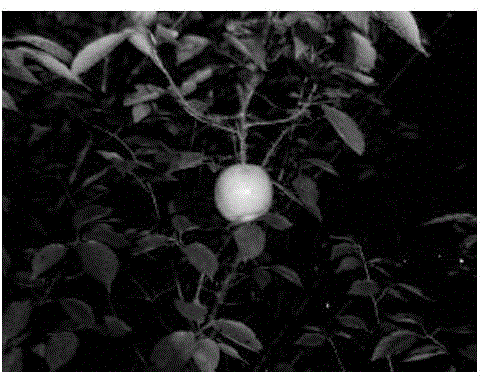
[0034] 1. Image acquisition
[0035] The present invention adopts the color CCD camera to collect images, but the images collected under the condition of low illumination at night and without artificial light source lighting are difficult to recognize. Therefore, artificial light sources are used for lighting, and the auxiliary camera is used for image acquisition. Compared with other light sources, incandescent lamps have good color rendering, which can ensure that the captured images will not produce color deviations and are closer to the real environment, and the image color saturation is better, which is more conducive to subsequent image segmentation and recognition.
[0036] When a single incandescent lamp is u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More