

A UV underwater navigation and positioning method based on tight combination of sins/lbl
A technology of navigation positioning and integrated navigation, which is applied to the tracking and positioning of underwater autonomous vehicles AUV, and the field of AUV underwater navigation and positioning based on SINS/LBL tight combination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] Below in conjunction with accompanying drawing, further illustrate the present invention.
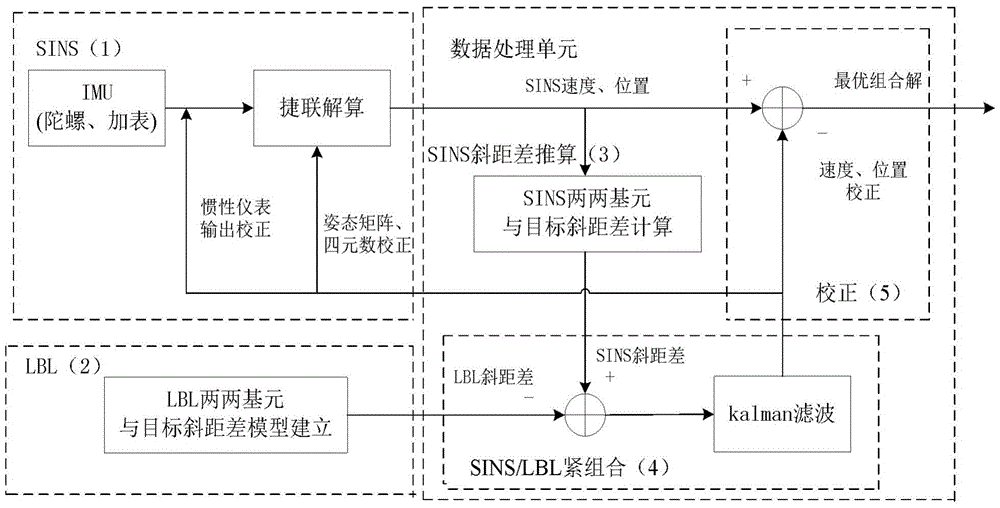
[0089] Such as figure 1 As shown, the present invention is composed of three parts: the strapdown inertial navigation system SINS (1) installed on the AUV, the long baseline hydroacoustic positioning system LBL (2) placed on the seabed, and a data processing unit. The data processing unit includes a SINS pairwise primitive and AUV slant distance difference calculation module (3), a SINS / LBL compact combination module (4) and a correction module (5). The AUV underwater autonomous navigation is completed by using the method of tight combination of SINS and LBL. The specific implementation steps are as follows:
[0090] (1) The output data of the inertial measurement unit (IMU) is obtained by strapdown calculation to obtain the position information of the AUV, and the earth geodetic coordinate P SINS (L S ,λ S , h S ) said, and P SINS (L S ,λ S , h S ) into the earth rectangu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More