

AUV (Autonomous Underwater Vehicle) underwater positioning method based on long-baseline underwater acoustic system aided navigation
An auxiliary navigation and underwater positioning technology, which is applied in the direction of radio wave measurement system, sound wave reradiation, instruments, etc., can solve the problem of large positioning error, reduce interference, ensure accuracy, and solve the problem of positioning error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
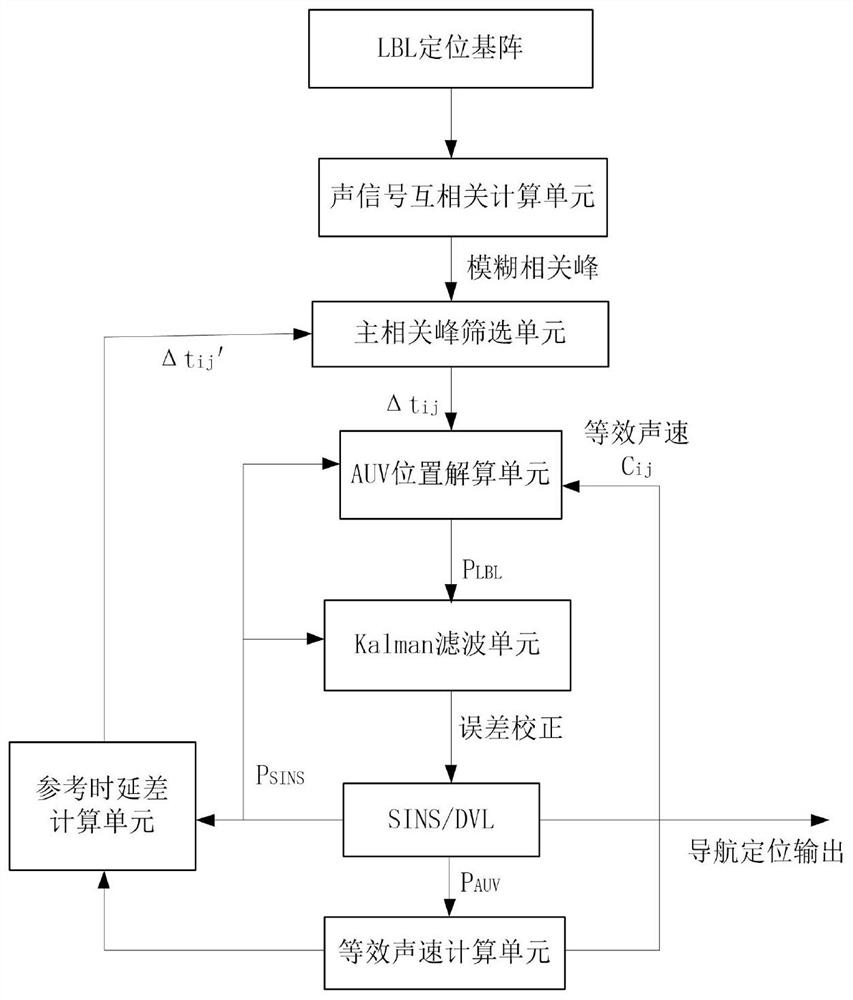
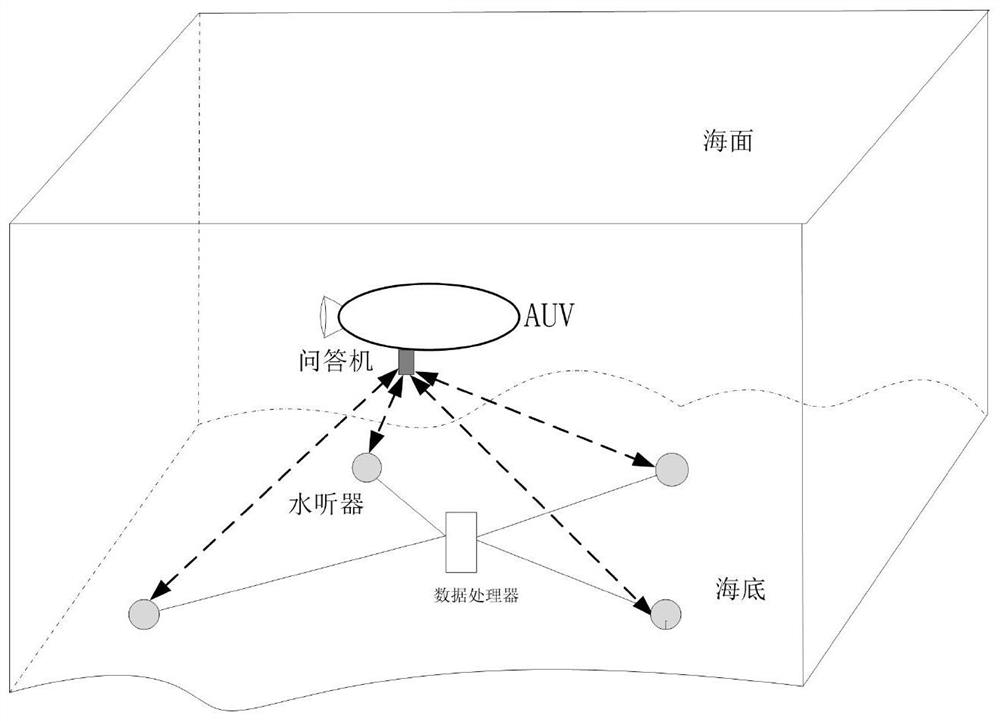
[0067] like figure 1 As shown, the present invention is based on a long baseline underwater acoustic system assisted navigation AUV underwater positioning method, which is realized through a long base line (Long Base Line, LBL) underwater acoustic system.
[0068] The long baseline underwater acoustic system includes a hydrophone array deployed on the seabed, a question answering machine and a data processor installed on the AUV. The strapdown inertial navigation system SINS and the Doppler log DVL system on the AUV are assisted by the long baseline hydroacoustic system to improve the accuracy of underwater positioning. Wherein, the hydrophone array includes a plurality of hydrophones arranged on the seabed.
[0069] The data processor includes an acoustic signal cross-correlation calculation unit, a main correlation peak screening unit, a reference delay difference calculation unit, an equivalent sound velocity calculation unit, an AUV position calculation unit and a Kalman ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More