

Dexterous hand teleoperation control method based on Kinect human hand motion capturing
A motion capture, operation control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as large delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be described in further detail in conjunction with the accompanying drawings and embodiments.
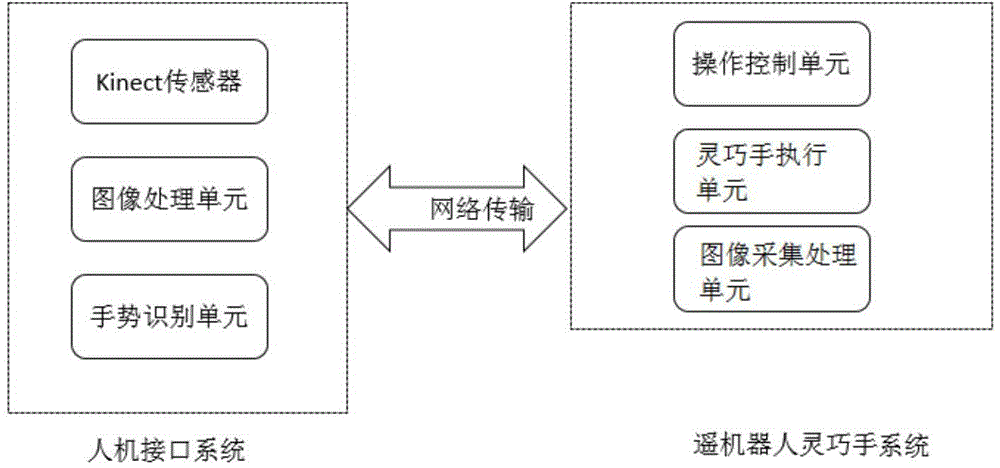
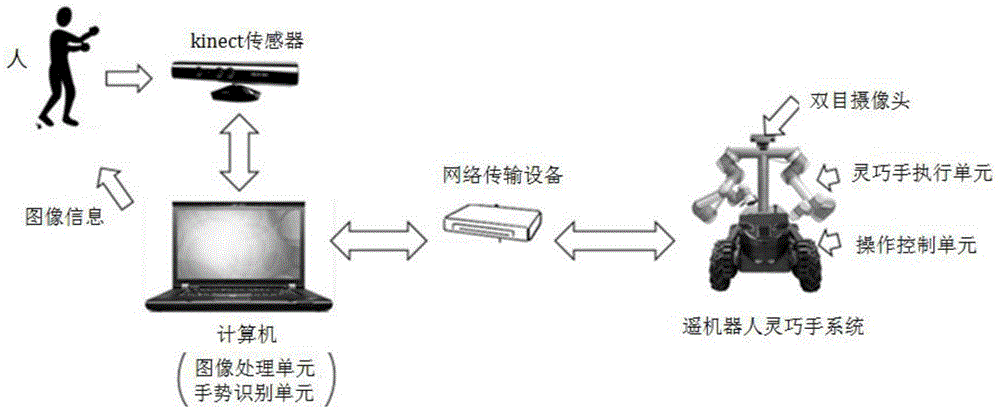
[0046] figure 1 and figure 2 The system structure block diagram and the system hardware connection schematic diagram for realizing the present invention are shown respectively. This system is a master-slave teleoperation system, which includes a man-machine interface system and a telerobot dexterous hand system. The human-machine interface system consists of a Kinect sensor and a computer. Kinect sensor is used to obtain image data. The computer includes an image processing unit and a gesture recognition unit for processing image data and gesture recognition. The telerobot dexterous hand system consists of an operation control unit, a dexterous hand execution unit, and an image acquisition and processing unit. The image acquisition and processing unit includes a binocular camera, a two-degree-of-freedom platform, and a data processor. The tele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More