

Multifunctional bionic jumping and walking robot
A walking robot and robot technology, applied in the field of bionic robots, can solve the problems of inability to adapt to the terrain environment, the robot's single bouncing trajectory and bouncing action, etc., and achieve the effect of strong versatility and good programmability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, but the present invention is not limited to the following embodiments.
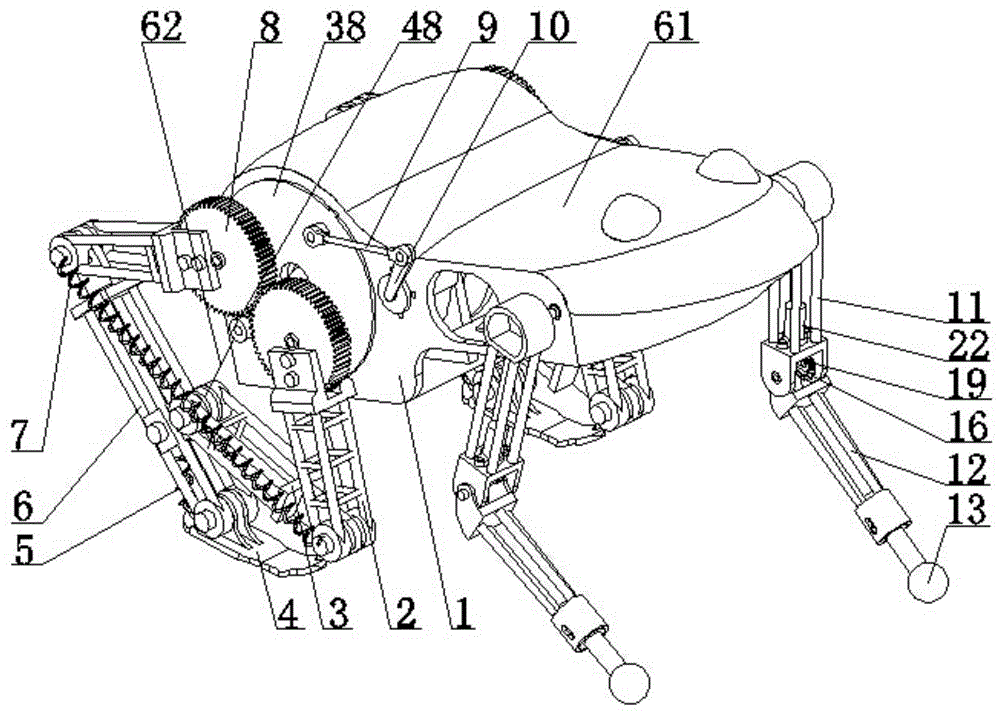
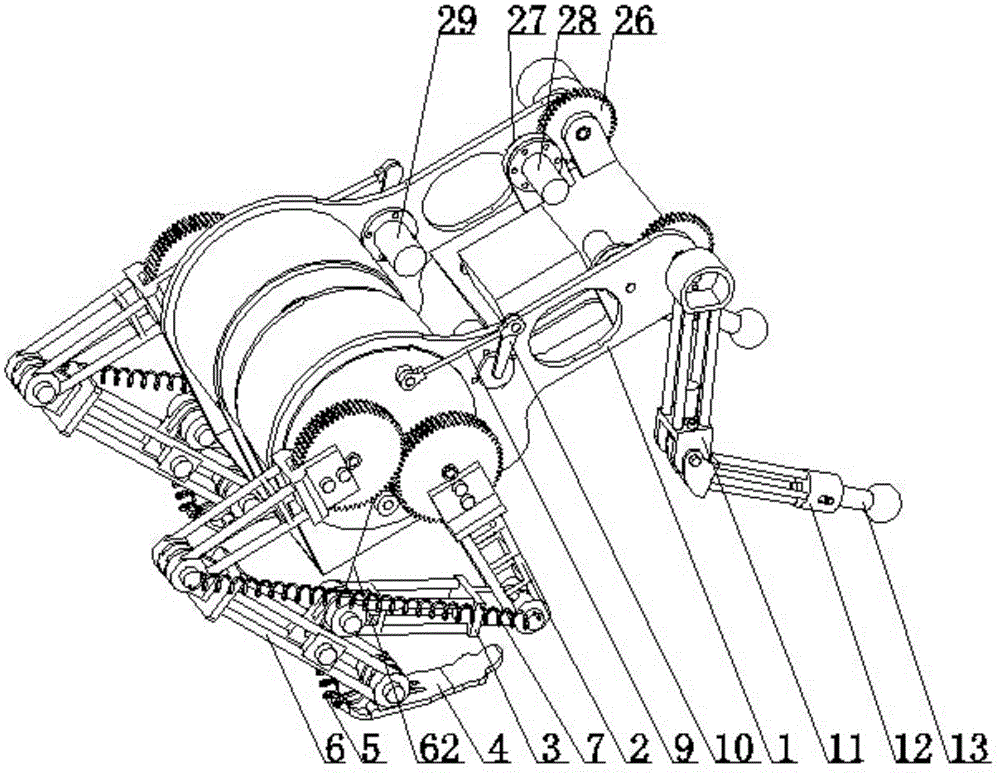
[0025] Such as figure 1 and 2 As shown, a multifunctional bionic bouncing and walking robot includes a robot torso 1, a protective cover 61, a forelimb bionic mechanism, a spring lock release mechanism and a rear limb bouncing mechanism; the protective cover 61 is connected to the robot torso 1 by screws; two forelimb bionic mechanisms The mechanism is arranged symmetrically at the front of the robot torso 1; the two hindlimb bouncing mechanisms are symmetrically arranged at the rear of the robot torso 1, and are respectively driven by a spring lock release mechanism.
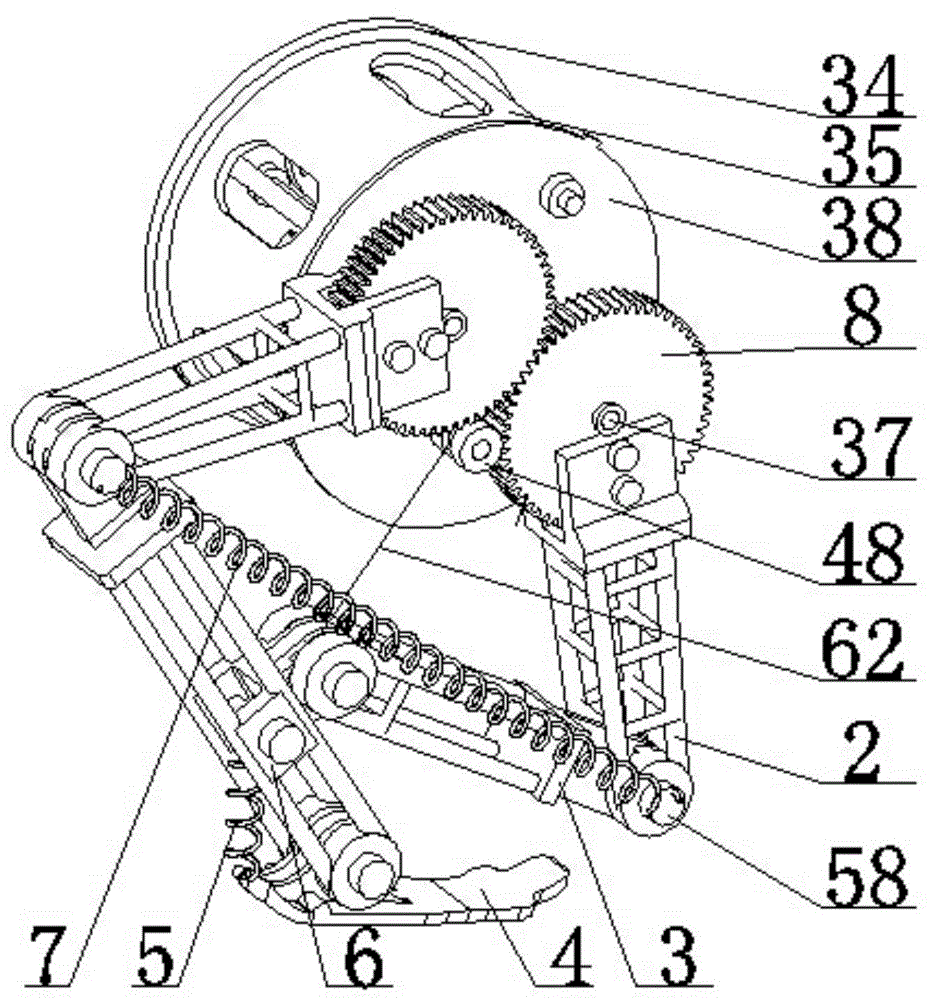
[0026] Such as figure 1 , 2 , shown in 3 and 10, the hindlimb bouncing mechanism comprises gear box housing 35, gear box loam cake 38, gear box lower cover 34, hip joint motor 29, crank one 10, connecting rod one 9...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More