

Robot demonstrating track generating method based on time-space characteristics
A technology for generating spatial features and trajectories, applied in electrical program control, recording and playback systems, etc., can solve problems such as powerlessness and inability to generate expected trajectories
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
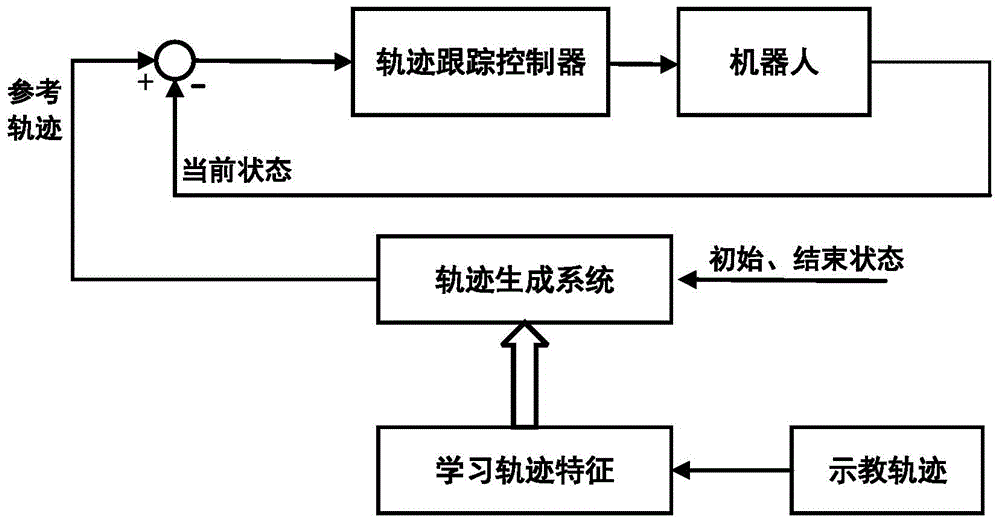
[0036] like figure 1 As shown, the present invention is based on the robot teaching track generation method of time-space feature, comprises the following steps:
[0037] 1) By operating the robot, record the teaching trajectory of each degree of freedom at the end of the robot at equal sampling time intervals, and teach the same trajectory multiple times to avoid the influence of local disturbance of a single teaching trajectory. For multi-joint DOF robots, the trajectory information of each DOF of joint points can also be recorded;
[0038] 2) Extract the common time-space features of multiple trajectories of the same type, and generate the template K of the trajectory
[0039] min V i W i J gctw = Σ i = 1 M ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More