Novel AGV visual navigation control method
A control method and visual navigation technology, applied in the field of vision-based AGV navigation control, can solve the problems of low guidance flexibility and lack of monitoring planning, and achieve the effect of high cost performance and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] In order to further explain the technical method and efficacy adopted by the present invention to achieve the predetermined purpose, the specific implementation and efficacy of a new AGV visual navigation control method of the present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
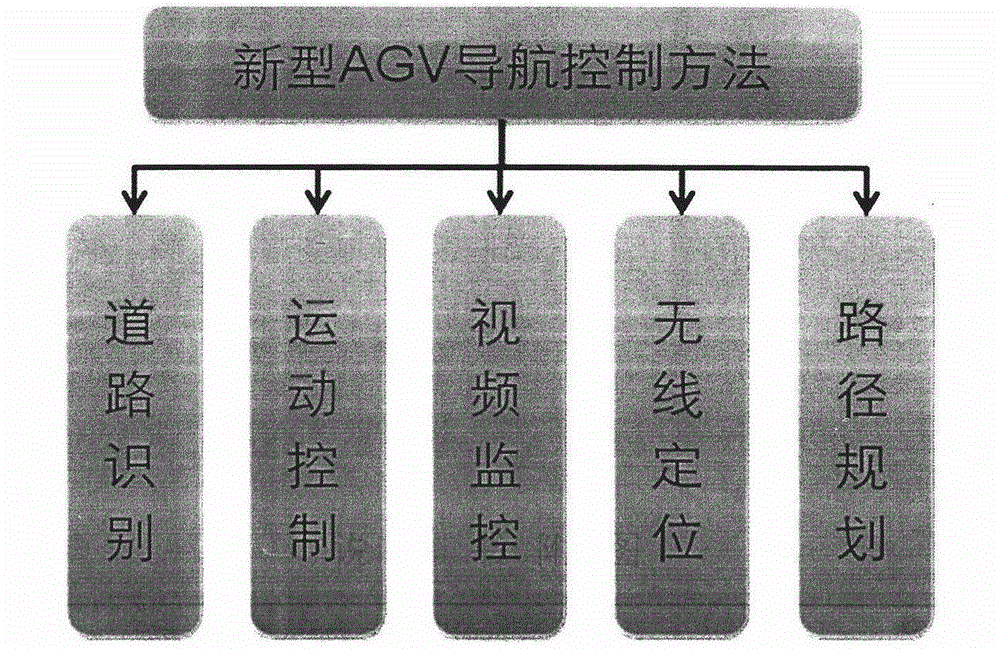
[0023] Such as figure 1 As shown, it is a composition block diagram of a novel AGVS visual navigation control method of the present invention. The visual navigation method controls the forward and backward of the AGV trolley by identifying the marking line of the road and taking its deviation and direction information as the input of the control module. It includes: a road identification module for road marking line identification, a host computer video monitoring module, a positioning module for AGV car positioning using RFID, a motion control module for controlling the operation of the car, and a path planning module.
[0024] Spe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More