

A biomimetic amphibious robot with wheel-foot-tail fin hybrid drive
A hybrid drive, amphibious technology, applied in amphibious vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of weak movement ability and single movement mode, and achieve the effect of strong environmental adaptability, flexible movement and compactness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings.
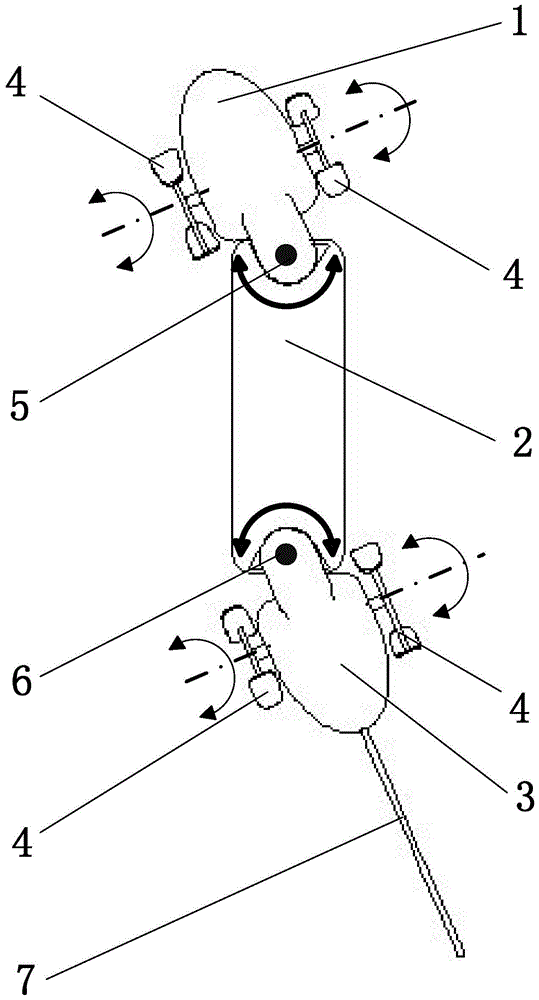
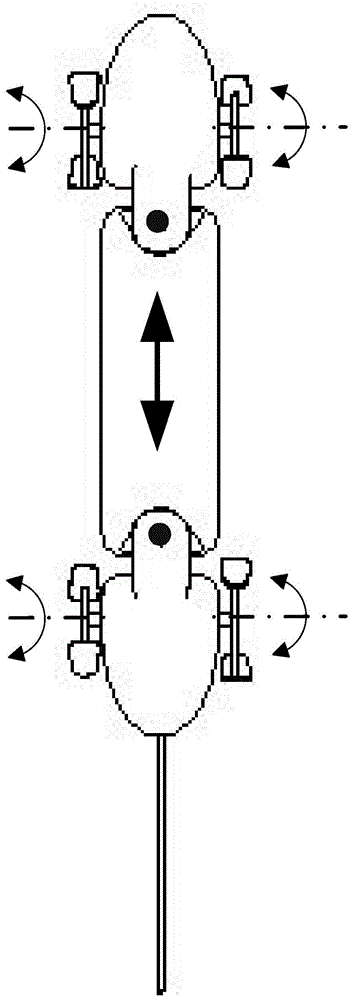
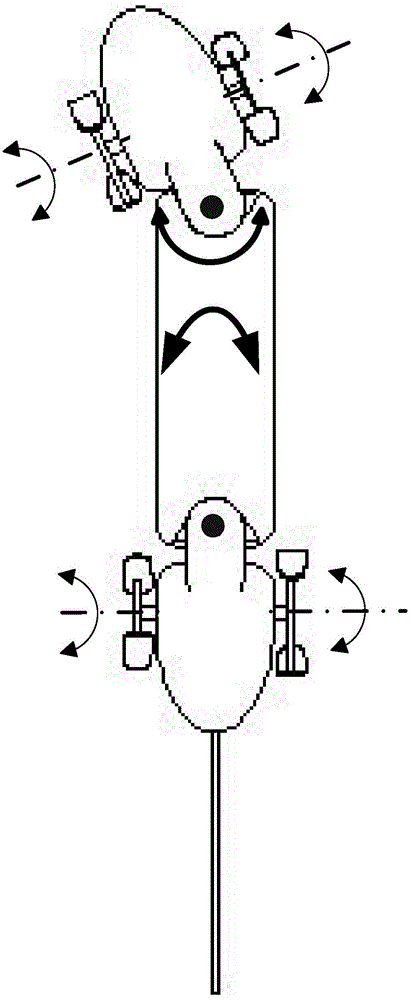
[0026] Such as figure 1 , image 3 and Figure 4 As shown, the bionic amphibious robot of the present invention adopts an integrated overall structural form based on wheel foot-tail fin hybrid drive, including a bow 1, a trunk 2, a stern 3, a wheel foot 4 and a tail fin 7, wherein the bow 1 is sealed by The connected bow cabin body 23 and the bow hatch cover 24 form a closed space, and the wheel foot drive controller 8 and the wheel foot drive unit 9 are mounted in the closed space; The wheel feet 4, the wheel feet 4 on both sides are driven by the same wheel foot drive unit 9. The stern part 3 forms a closed space through the stern cabin body 42 and the stern hatch cover 40 which are sealed and connected, and a wheel drive controller 8 and a wheel drive unit 9 are mounted in the closed space; the two sides of the stern part 3 are installed There are whee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More