

Control method for rehabilitation training of lower extremity exoskeleton rehabilitation robot
A rehabilitation robot and control method technology, applied in the field of rehabilitation medicine, can solve problems such as low-level control methods that do not consider the influence of control and rarely involve active and passive training.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
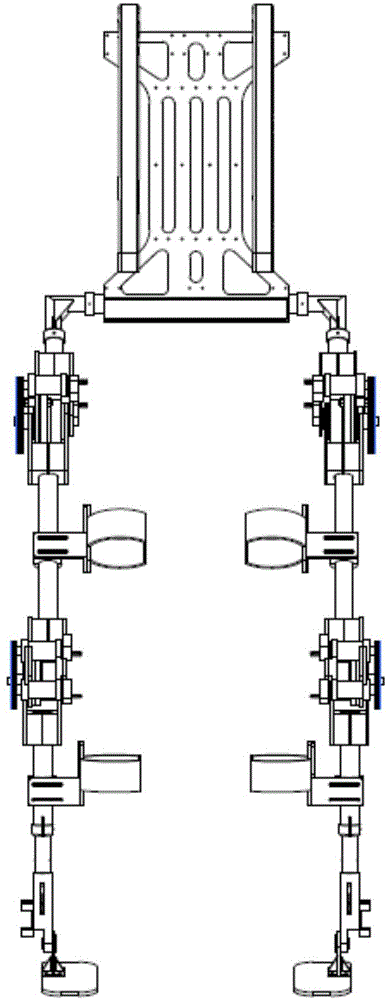
[0038] figure 1 It is a schematic diagram of the mechanical structure of the lower extremity exoskeleton rehabilitation robot.
[0039] In this example, if figure 1 As shown, each leg of the lower extremity exoskeleton rehabilitation robot has two degrees of freedom, that is, the hip joint and the knee joint each have one degree of freedom. In the following adaptive controller design process, they are all designed based on the single-leg 2-degree-of-freedom model.
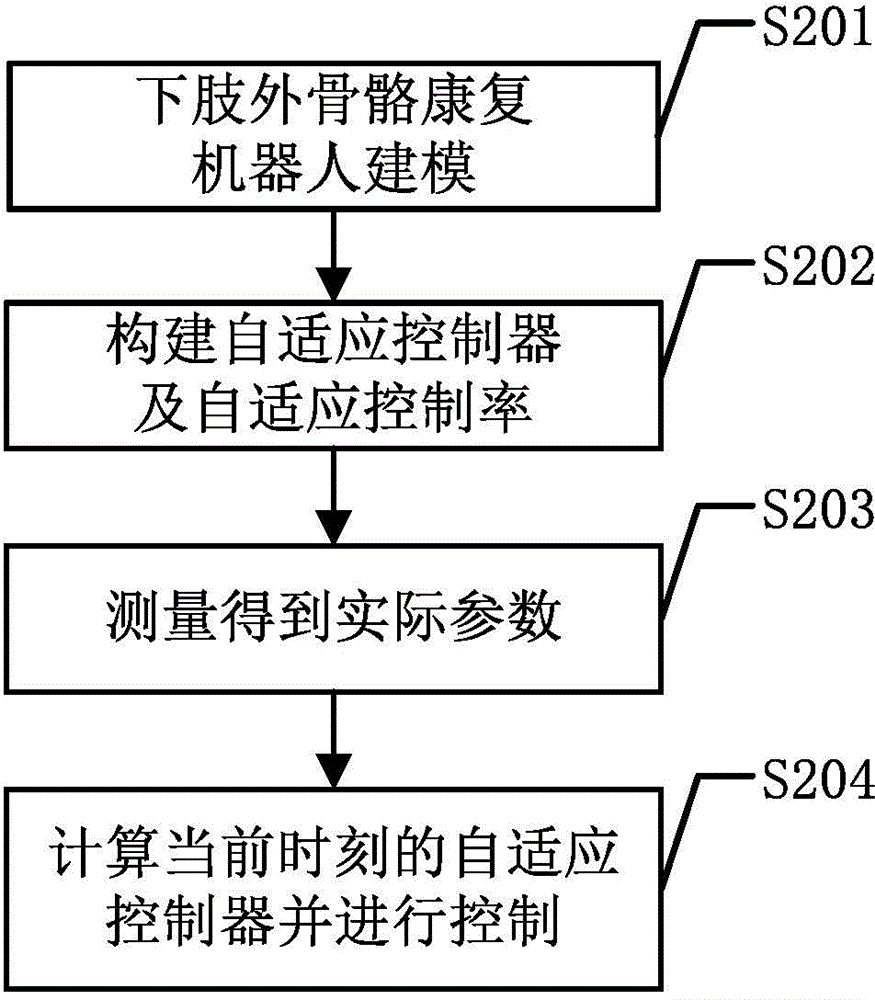
[0040] figure 2 It is a flow chart of the control method for the rehabilitation training of the lower limb exoskeleton rehabilitation robot of the present invention.
[0041] Such as figure 2 As shown, in this embodiment, a control method for rehabilitation training of a lower extremity exoskeleton rehabilitation robot includes the following steps:
[0042] S201. Model the lower limb exoskeleton rehabilitation robot, and obtain the model equation of the lower limb exoskeleton rehabilitation robot as:
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More