

A Pose Calculation Method for Pipeline Flexible Assembly and Welding Robot Based on Measurement Data
A robotic and flexible technology, applied in measuring devices, measuring angles, navigation and calculation tools, etc., can solve problems such as low efficiency, long preparation period, inconvenient production management, etc., to reduce costs, improve versatility, and improve production efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Below in conjunction with accompanying drawing, technical scheme of the present invention is described further:
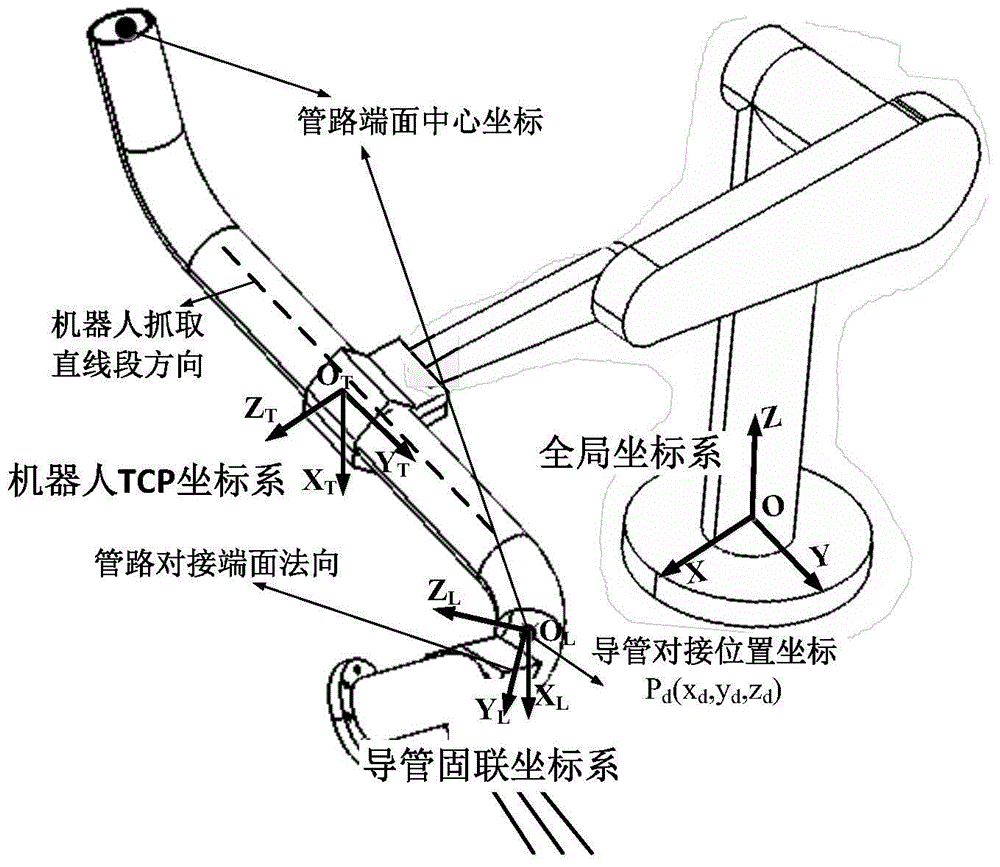
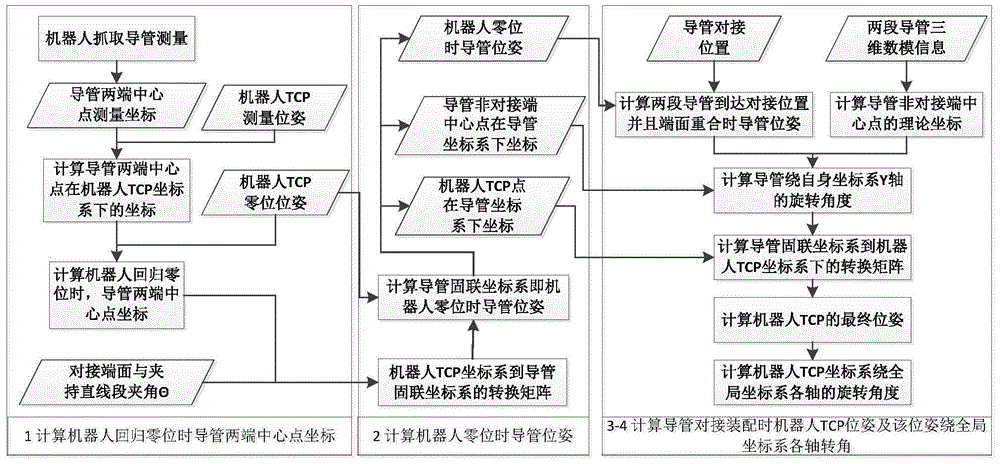
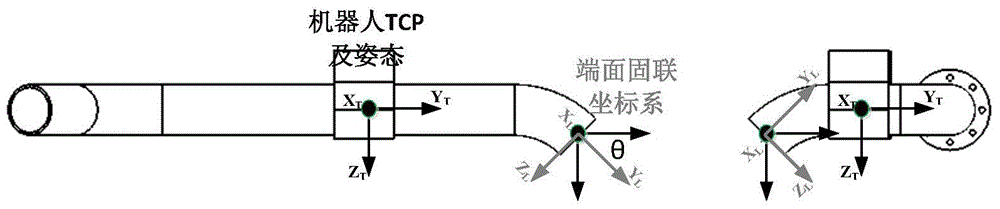
[0026] Such as figure 2 As shown, the present invention proposes a method for calculating the pose of a pipeline flexible welding robot based on measurement data, and the specific steps are as follows:
[0027] Step 1: Calculate the coordinates of the center points at both ends of the catheter when the robot returns to zero.
[0028] According to formula (1), when the robot returns to zero position, the coordinates P of the center point of the two ends of the catheter can be obtained s (x s ,y s ,z s ), P Fs (x fs ,y fs ,z fs ), and the coordinates P of the two center points in the robot TCP coordinate system tcp (x t ,y t ,z t ), P Ftcp (x ft ,y ft ,z ft ).
[0029] P m = T m ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More