

Global positioning method of laser-navigated AGV (automatic guided vehicle)
A positioning method and laser navigation technology, applied in the field of global positioning of laser navigation AGV
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to facilitate the understanding of those skilled in the art, a global positioning method for a laser radar-guided AGV of the present invention will be further described below in conjunction with the embodiments and accompanying drawings, so as to make the purpose, technical solution and effect of the present invention clearer and clearer. The content mentioned in the manner is not a limitation of the present invention.
[0045] It should be understood that the specific embodiments described in the present invention are only examples to illustrate the spirit of the present invention, and those skilled in the art can make various modifications or supplements or replace them in similar ways, all of which Improvements and transformations should belong to the scope of protection of the appended claims of the present invention.
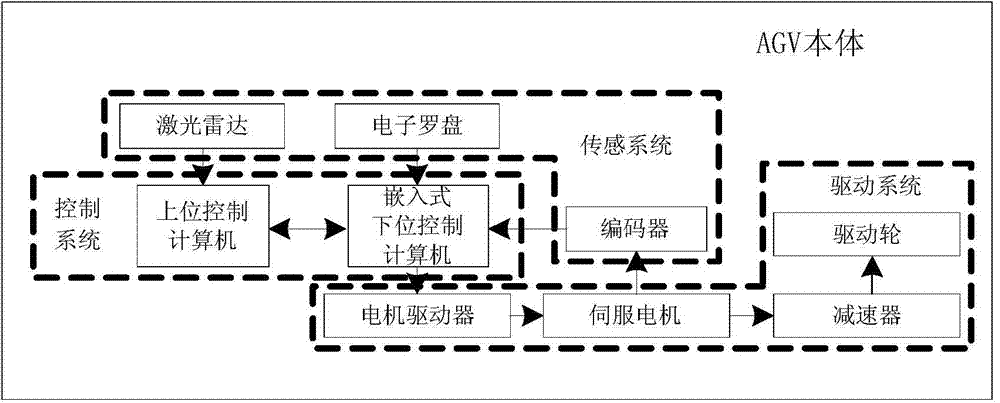
[0046] refer to figure 2As shown, the hardware structure of the laser navigation AGV system adopted in the global positioning method of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More