Bionic underwater robot fish driving mechanism and working method thereof
A driving mechanism and underwater machine technology, applied in the direction of non-rotating propulsion elements, etc., can solve the problems of large lateral space, scraping, and difficult passage of narrow waterways, etc., and achieve lateral size reduction, good passability, and large driving force Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] An embodiment of the present invention will be described below in conjunction with the accompanying drawings.
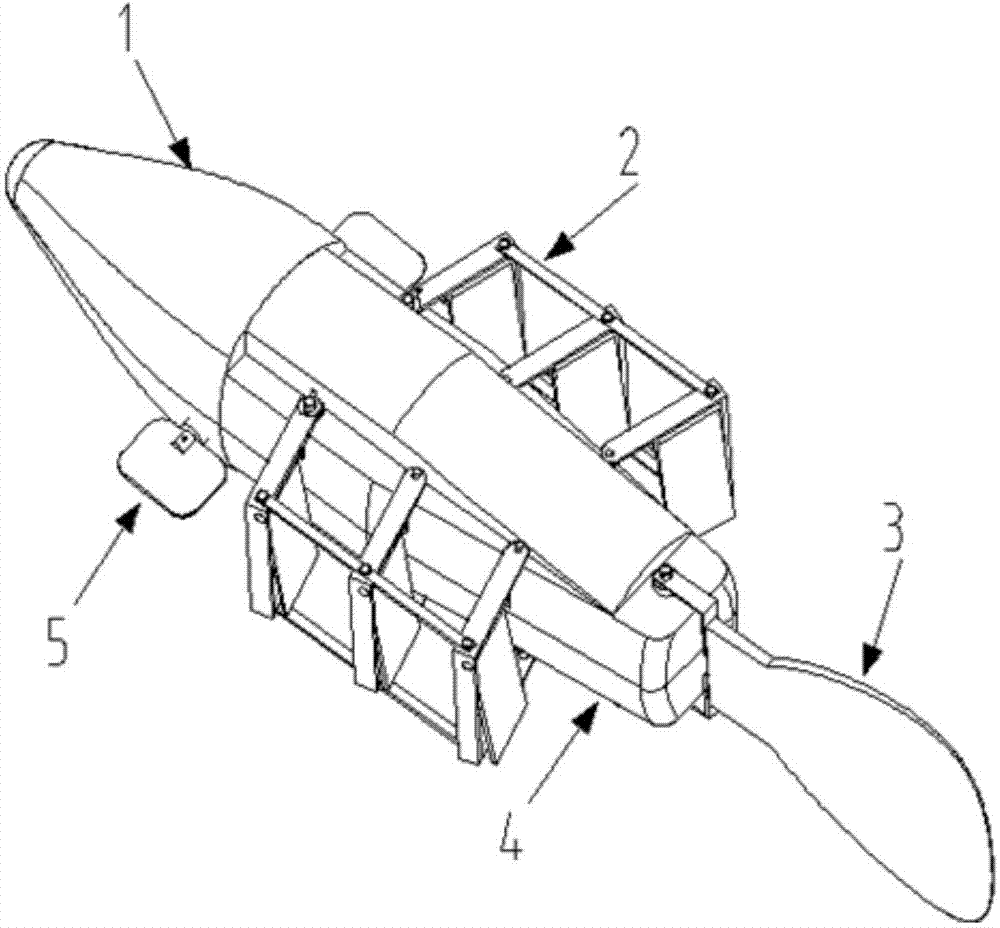
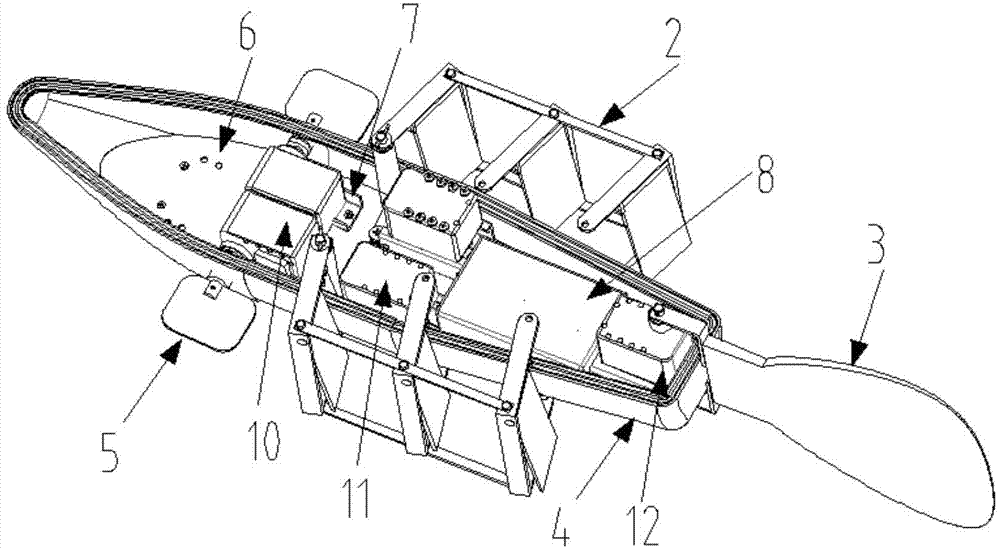
[0015] Such as figure 1 , figure 2 As shown, the bionic underwater robotic fish of the embodiment is composed of an upper housing 1, a driving mechanism, a tail fin 3, a lower housing 4, a sinking fin 5, etc.; a tail fin steering gear 12 is installed at the tail of the lower housing 4; In 4, a mounting platform 6 is fixedly installed, and two sets of steering gear mounting frames 7 are fixedly mounted on the left and right sides of the mounting frame 6, and the sinking and floating fin steering gear 10 and the power fin steering gear 11 are fixedly installed in the front and rear of each steering gear mounting frame 7; The driving mechanism of the bionic underwater robotic fish is composed of two propulsion fins 2 symmetrically arranged on both sides of the body of the robotic fish, the tail fin 3 is driven by the tail fin steering gear 12, and the sinking a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com