

Walking detection control method for auto-moving robot
A control method and robot technology, applied in two-dimensional position/channel control, automatic starting device and other directions, can solve problems such as damage and robot fall, achieve accurate judgment, prevent misoperation and fall damage, and prevent missed judgments and mistakes. the effect of judgment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
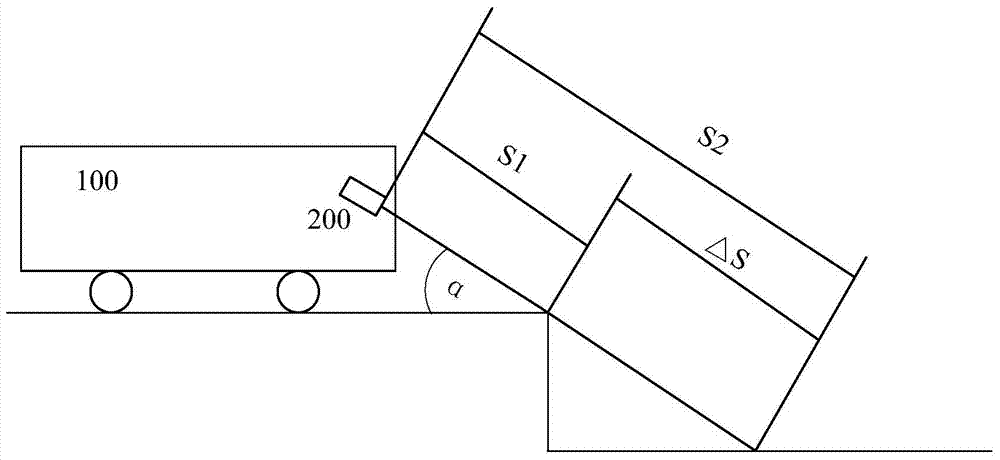
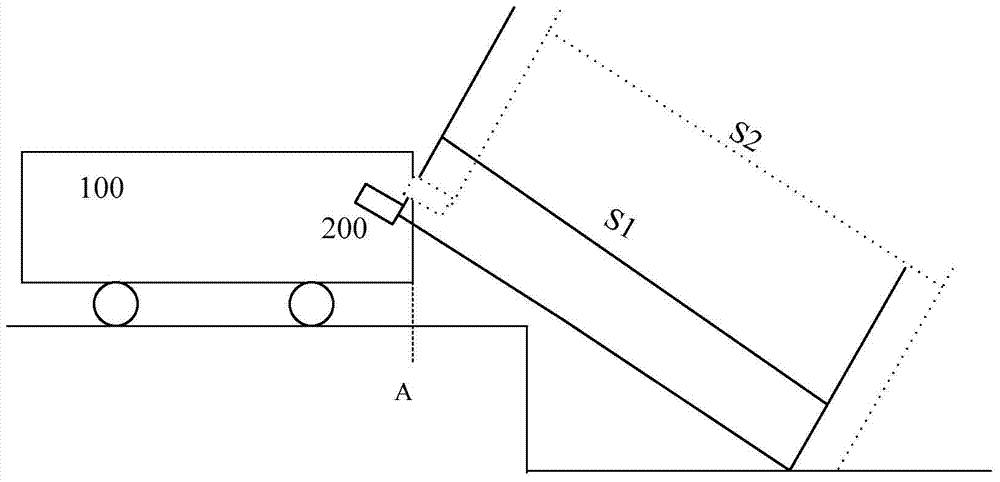
[0026] figure 1 It is a schematic diagram of the motion state of the self-mobile robot of the present invention. The invention provides a walking detection control method of a self-mobile robot, such as figure 1 As shown, the self-mobile robot includes a body 100, on which a control unit, a drive unit and a sensing unit are arranged, and the sensing unit sends the sensed signal to the control unit, and the control unit controls the sensor according to the sensing signal. The drive unit drives the movement of the body. The sensing unit includes a displacement detection sensor 200, and the displacement detection sensor 200 is installed obliquely on the body 100, and the included angle between the central line and the bottom surface of the body is α, where 0°figure 1 As shown, the displacement detection sensor 200 is installed obliquely, so that the detection head is outward, so that the ground conditions ahead can be detected in advance, and if there are steps, there is suffici...
Embodiment 2
[0034] In the foregoing embodiments, it is the judgment and control of the walking environment during the traveling process of the self-mobile robot. In addition to the above judgment control process, if the self-mobile robot is in the initial position just after starting up and before entering the motion state, it also needs to judge the state it is in. Therefore, this embodiment is an optimization of the judgment control process of the embodiment. Specifically, before the step 100, it also includes:
[0035] Step 010: Preset the basic distance value S0 in the self-mobile robot, which is 60-70 cm;
[0036] Step 020: Put the self-mobile robot into the working area. Before starting to walk normally, the displacement detection sensor first scans the linear distance between its setting position and the walking surface of the working area to obtain the initial distance value S3;
[0037] Step 030: Compare the initial distance value S3 with the basic distance value S0 to determine...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More