

Indoor human body detection method based on 3D (three-dimensional) point cloud image
A point cloud image and human body detection technology, applied in the direction of instruments, character and pattern recognition, computer components, etc., can solve the problems of huge calculation support, difference in detection methods, dependence on background segmentation, etc., and achieve easy deployment and low calculation Small, universal effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
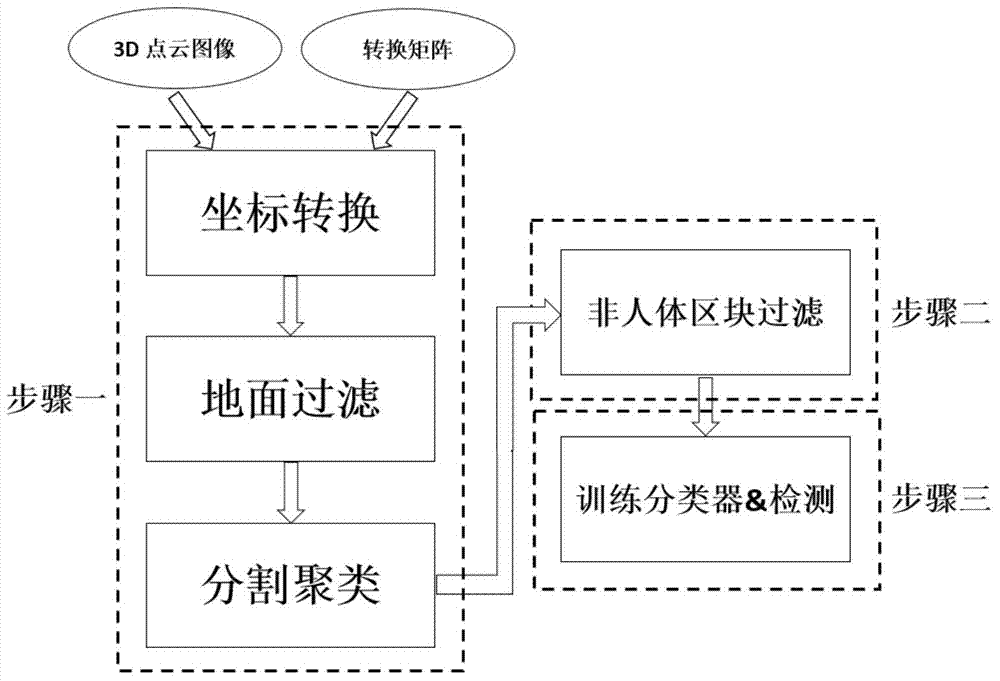
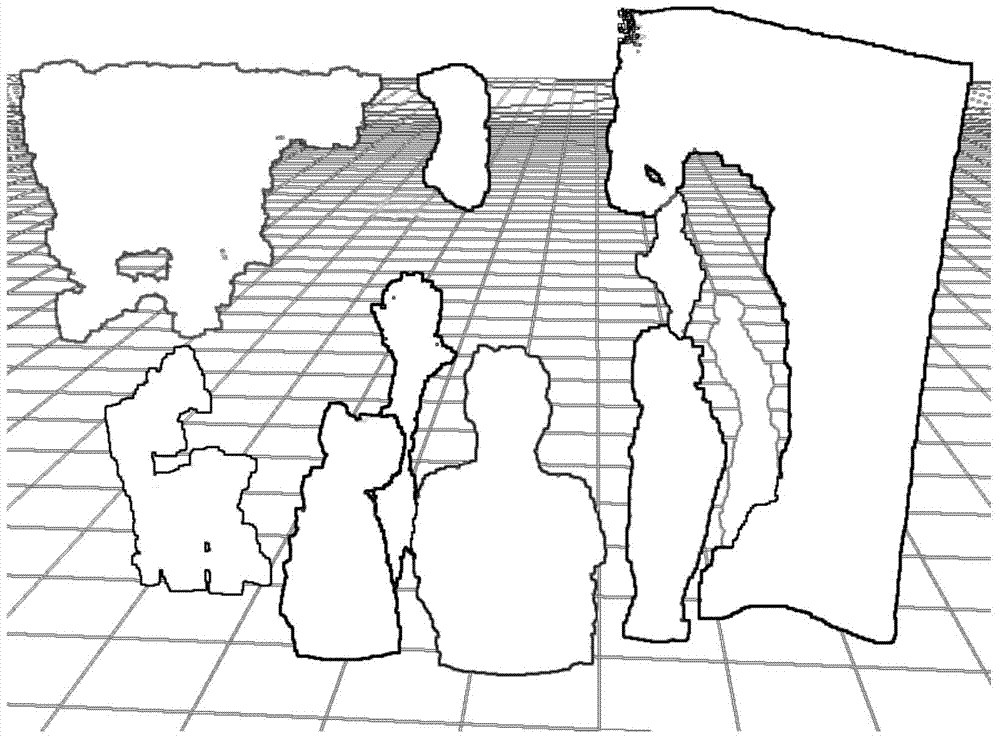
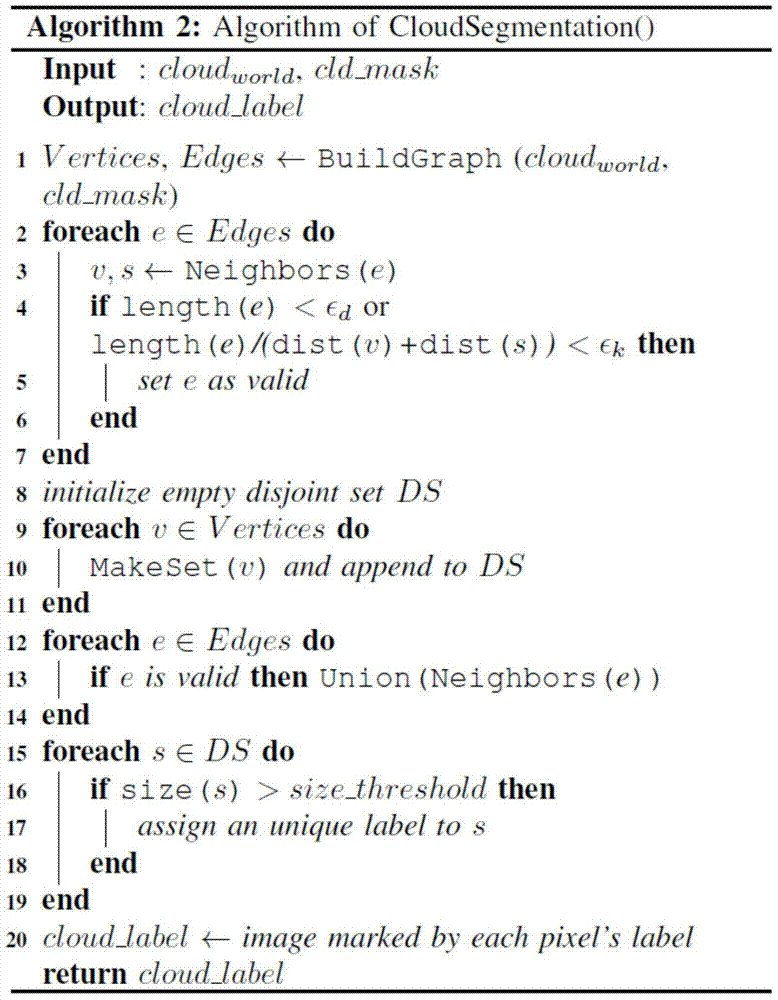
[0029] The indoor human detection method based on 3D point cloud data is mainly divided into the following steps for the problems to be solved: the segmentation and clustering steps for 3D point cloud images, the non-human body area filtering step, and the human body area detection step.
[0030] In the application example of this method, only one sensor (generally 50cm to 3m range, 2-3cm accuracy, such as Microsoft's Kinect, PrimeSense's Carmine, ASUS' Xtion, etc.) that can acquire 3D point cloud images is needed, and the sensor A connected computer (with certain computing power, CPU i5 and above, 4G and above memory). For mobile robot platforms, if the sensor is placed on the gimbal, real-time gimbal feedback is required to determine the sensor attitude; for indoor fixed-position applications, only the position (coordinates, height, and orien...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More