

Devices and Surgical Robots for Surgical Navigation
A technique for surgical navigation and equipment, applied in the field of medical devices, can solve the problem of inability to guarantee the continuous positioning of the device to be positioned, and achieve the effects of low cost, small calculation amount, and accurate spatial positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0025] Reference will now be made in detail to embodiments of the present invention, examples of which are illustrated in the accompanying drawings, wherein like numerals refer to like parts throughout. The embodiments are described below in order to explain the present invention by referring to the figures.
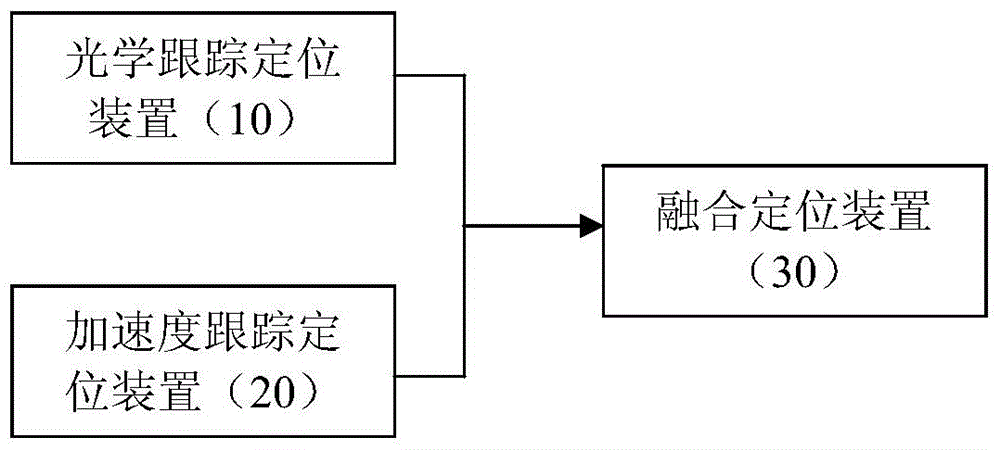
[0026] figure 2 A structural block diagram of a device for surgical navigation according to an exemplary embodiment of the present invention is shown. Such as figure 2 As shown, the device for surgical navigation according to the exemplary embodiment of the present invention includes: an optical tracking and positioning device 10 , an acceleration tracking and positioning device 20 and a fusion positioning device 30 . These devices can be realized by general-purpose hardware processors such as digital signal processors and field programmable gate arrays, or can be realized by dedicated hardware processors such as dedicated chips, or can be completely realized by soft...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More