

PID parameter setting method based on self-adaptation ant colony genetic hybrid algorithm
A hybrid algorithm and parameter tuning technology, applied in adaptive control, instrumentation, control/regulation systems, etc., can solve problems such as slow initial solution speed, inability to make good use of system feedback information, and lack of pheromones
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
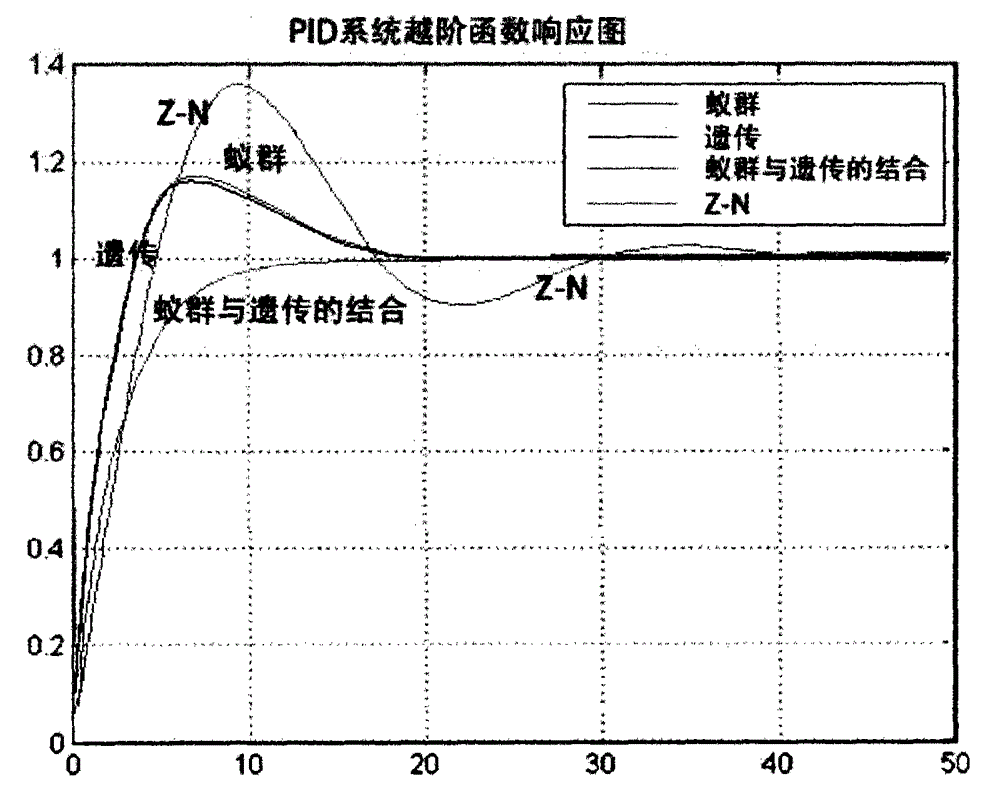
[0044] see figure 1 , the parameter optimization method of the present invention is applied to the impact rotary electro-hydraulic servo system of a certain type of hydraulic rock bolter, and the transfer function of the electro-hydraulic servo system is The algorithm is used to simulate the transfer function of the system;
[0045] In the simulation experiment, take the system input quantity as the unit step signal. Set Q=1, ρ=0.7, α=1, the number of ants is 30; the number of iterations is 100, the parameter range of the PID control system: K P The range is [0.00001 20], K i , K d The value range of is [0.00001 2];
[0046] In order to analyze the performance of the algorithm proposed by the present invention, it has been compared with Z-N method, ACS algorithm, GA algorithm and ant colony genetic mixed algorithm ACS-GA (this paper's algorithm) respectively, figure 1 It is a PID unit step response diagram. The unit step response curve generated by the Z-N method in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More