

Concave convex mixed complex polygon farmland unmanned aerial vehicle spraying operation flight path planning method
A track planning, polygonal technology, applied in two-dimensional position/channel control and other directions, can solve the problems of low fuel consumption, short time, inappropriate pesticide spraying operations, etc., to reduce energy consumption, reduce complexity and improve spraying. The effect of efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
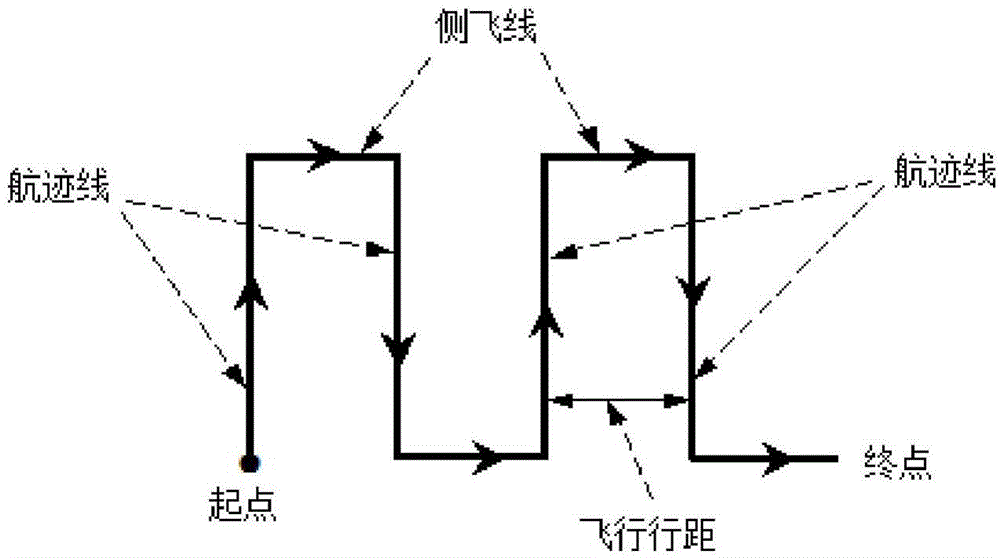
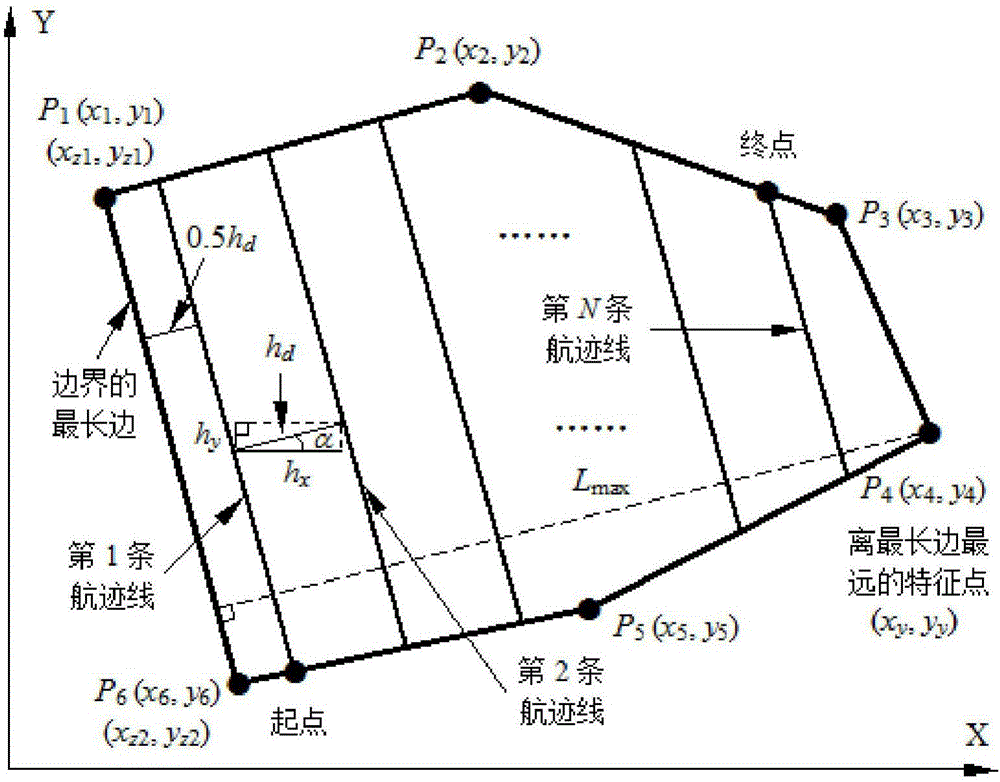
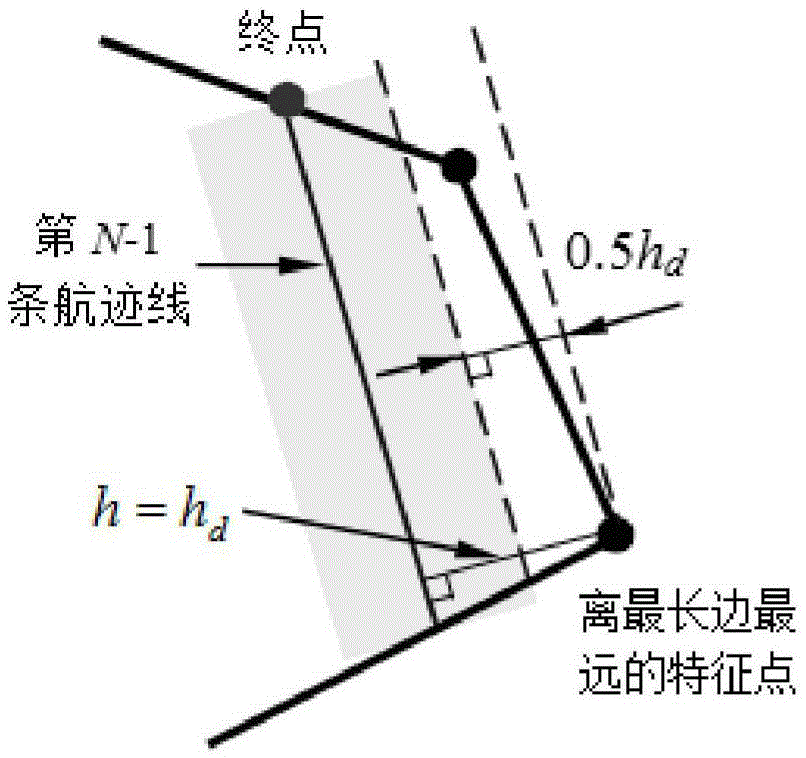
[0039] The main task of the present invention is to determine one group of track lines (the track line is from the longest side of the polygon to the farthest feature point on the other side of the farmland area boundary opposite to the longest side, parallel to the longest side A group of equally spaced parallel lines, the width of the interval is set as the flight distance), and the intersection point of this group of flight path lines and the concave-convex mixed polygonal farmland boundary is calculated. The main steps of its realization are: (1) Use a handheld GPS positioning device to collect the latitude and longitude coordinates of all the feature points (key location points) on the border of the farmland operation area and send these coordinate information to a tablet computer (it is an unmanned helicopter). Flying monitoring and management equipment), the tablet computer connects two adjacent points with a straight line according to the order of these feature points, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More