

Human body detection and tracking method and device based on unmanned aerial vehicle mobile platform
A technology of human body detection and tracking device, which is applied in the field of long-term and stable human body tracking, can solve problems such as long-term stable tracking, achieve stable and effective tracking, achieve long-term, overcome jitter and occlusion effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
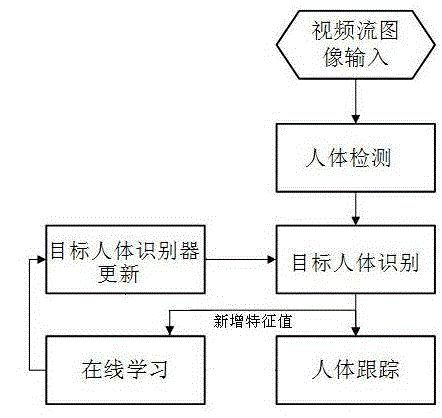
[0033] Such as figure 1 , the first embodiment of the present invention includes the following steps:
[0034] Target selection: Before the tracking starts, the target human body needs to be selected. The selection method can be manual selection or automatic selection. Manual selection is to determine the target to be tracked by manually marking the video image returned by the UAV; automatic selection does not require manual intervention, and can be automatically selected by the machine through human detection, recognition algorithms and set rules. It can be realized on the machine or in the remote control terminal. It should be noted that target selection is not a necessary step for target detection and tracking, and target selection can also be achieved in other ways.
[0035] Human detector training: use the eigenvalues of the human body to train the first recognition model to obtain a human detector.
[0036] In this embodiment, the feature values of the human body...
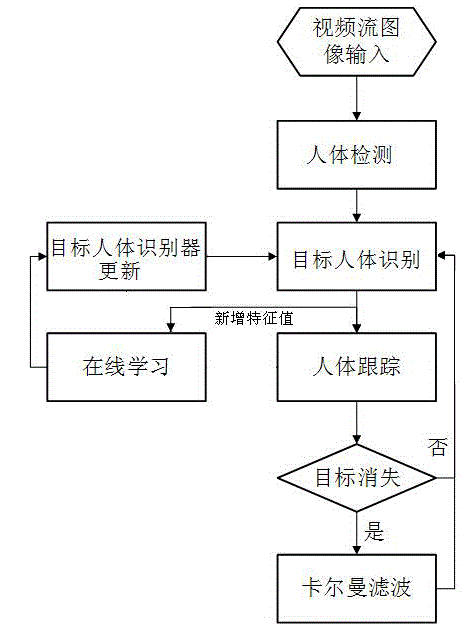
no. 2 example
[0047] see figure 2 , this embodiment also adds a target human body retrieval step in the target human body detection step of the first embodiment: when the target human body disappears in the video frame captured by the drone because it is blocked or exceeds the camera field of view, use The Kalman filter predicts the area where the target body may appear in the next video frame according to the video frame captured before the target body is lost; when the next video frame is captured, the feature value of the object in the area is preferentially extracted, and then the feature value is sent to the human body detector, and the human body detector judges whether a human body is detected according to the characteristic value, and if so, further sends the characteristic value into the target human body recognizer, and the target human body recognizer judges whether the target is detected according to the characteristic value human body. The advantage of doing this is that afte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More