

Robot map drafting and positioning method based on wireless base station and laser sensor as well as system thereof
A laser sensor and wireless base station technology, which is applied in the field of robot mapping and positioning, can solve problems such as deviation and inaccurate scanning of maps, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
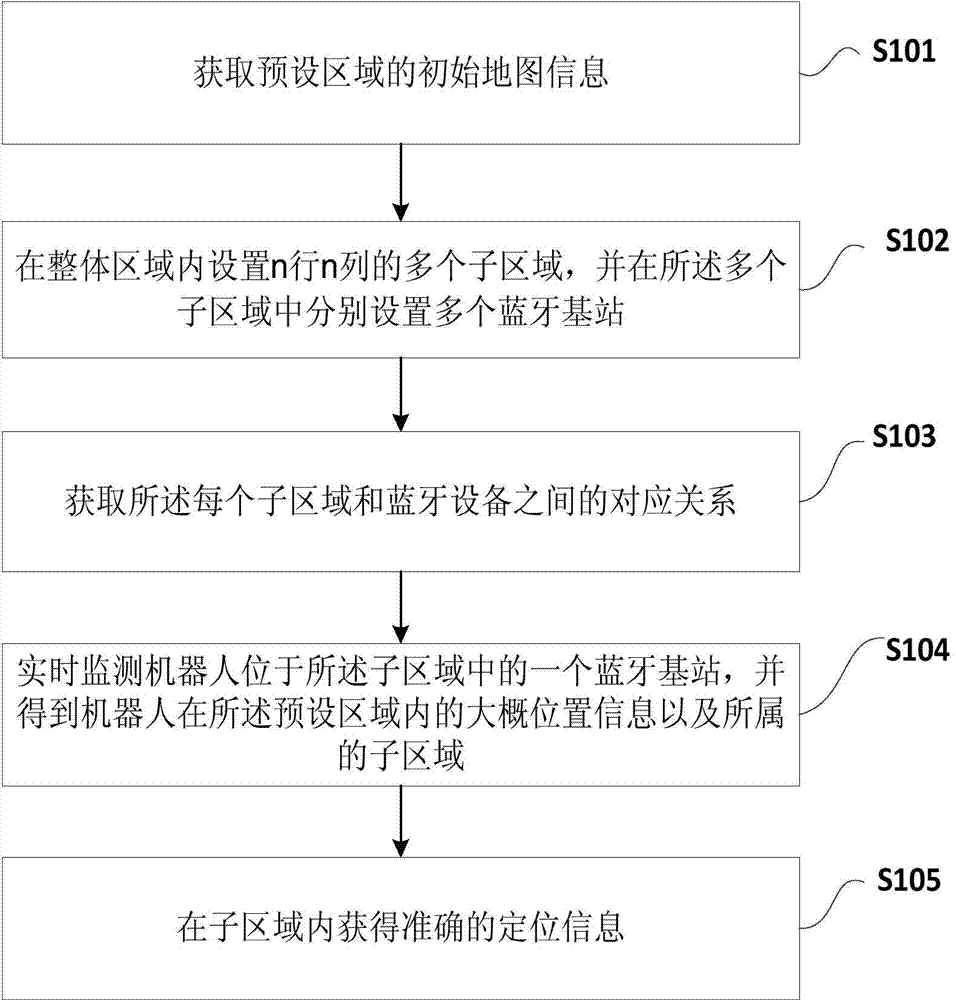
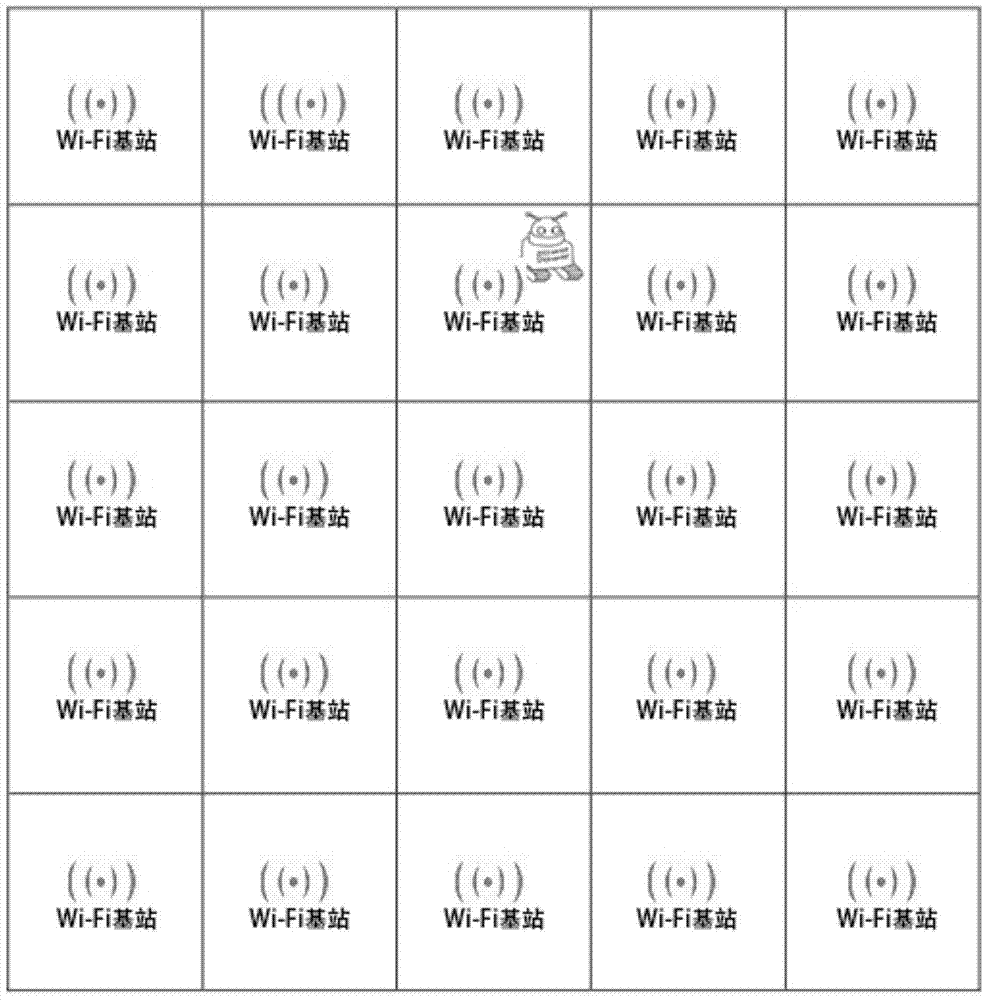
[0056] figure 1 It is a schematic flowchart of a method for mapping and positioning a robot based on a wireless base station and a laser sensor in an embodiment of the present invention, figure 2 It is a schematic diagram of setting n rows and n columns of sub-areas in the preset area in the embodiment of the present invention, and setting multiple wireless base stations in the sub-areas, as shown in figure 1 and figure 2 As shown, the method includes the following steps:
[0057] S101. Obtain initial map information of a preset area;
[0058] S102. Set multiple sub-areas with n rows and n columns in the overall area, and respectively set multiple wireless base stations in the multiple sub-areas;
[0059] S103. Obta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More