

Modularized robot based on intelligent mechanical arm
A technology of intelligent machinery and robots, which is applied in the field of robots, can solve the problems of difficult adaptation of structural dynamics, limited working precision, and low working load, and achieve the effects of low cost, improved working precision, and increased standardization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
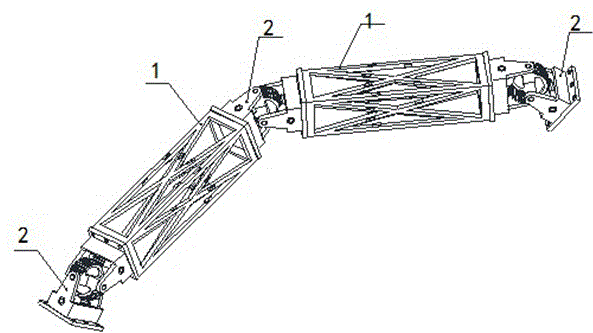
[0031] As shown in Figure 1, it is a schematic structural diagram of a modular robot based on an intelligent manipulator, including an intelligent manipulator 1 and a modular joint 2, and the intelligent manipulator 1 is connected in series through the modular joint 2 to form a multi-degree-of-freedom robot.
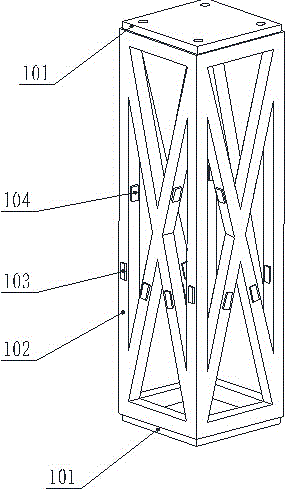
[0032] As shown in Figure 2, the intelligent robotic arm 1 includes a body frame 102, a body connecting plate 101, a piezoelectric ceramic driver 103, and a strain sensor 104, wherein the body connecting plate 101 is installed at both ends of the body frame 102, and the body frame 102 is shown in the figure 2, the integrally processed truss-like structure is in the form of a cuboid hollowed-out structure. The hollowed-out body frame 102 is composed of a series of basic beams in form, and the basic beams include basic beams (rectangular four sides) and the intersecting basic beams on the four sides of the body frame (diagonals of the rectangle).
[0033] As shown in Fig...
Embodiment 2
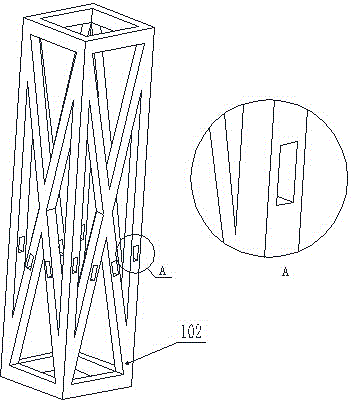
[0046] In this embodiment, the structure of the modular robot based on the intelligent manipulator is basically the same as that of Embodiment 1, but the structure of the body frame is shown in Figure 5-6, and the basic holes on the body frame 102 for installing the piezoelectric ceramic driver The slots are arranged in pairs with double-hole slots; piezoelectric ceramic drivers are respectively installed in the paired double-hole slots, which can generate displacement output along the length direction of the basic beam section.
[0047] To sum up, the above is the content of the embodiments of the present invention, and obviously the embodiments of the present invention are not limited thereto, and the functions of the present invention can be used to realize corresponding requirements according to different application environments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More