

Electrically-driven small bionic four-leg robot
A four-legged robot, electric drive technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of complex structure of robots, large working noise of robots, slow static gait, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
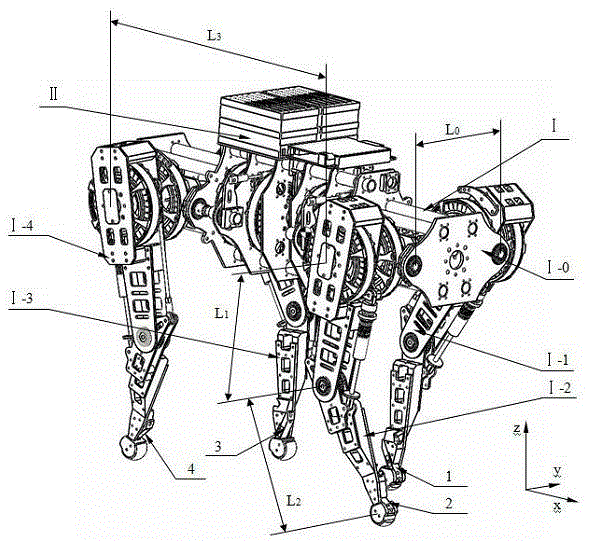
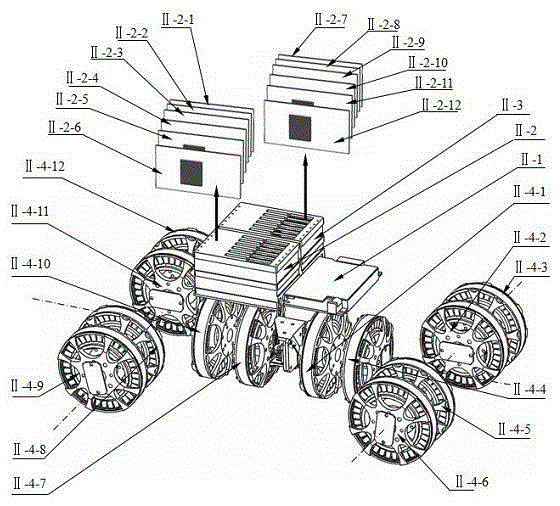
[0031] Such as figure 1 , figure 2 As shown, the electric-driven small bionic quadruped robot includes a mechanical system I and a power and motion control system II; it is characterized in that: the mechanical system I includes a Body module I-0 and four Leg modules I-1 and I-2 , I-3, I-4; the power and motion control system II includes a motion control module II-1, a first motor drive and control module II-2, a second motor drive and control module II-3, and a first motor Ⅱ-4-1, the second motor Ⅱ-4-2, the third motor Ⅱ-4-3, the fourth motor Ⅱ-4-4, the fifth motor Ⅱ-4-5, the sixth motor Ⅱ-4-6 , Seventh Motor II-4-7, Eighth Motor II-4-8, Ninth Motor II-4-9, Tenth Motor II-4-10, Eleventh Motor II-4-11, Twelfth Motor Motor II-4-12; the Body module I-0 serves as the body of a quadruped robot; the first Leg module I-1, the second Leg module I-2, the third Leg module I-3, and the fourth Leg module The modules I-4 are symmetrically installed on the Body module I-0 respectively;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More