

Unmanned vehicle-side longitudinal coupling tracking control method based on rapid terminal sliding mode principle
A terminal sliding mode and tracking control technology, which is applied in two-dimensional position/channel control, adaptive control, general control system, etc., can solve the problems of less research, large tracking error, and low control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] According to the principle of side-to-longitudinal coupling control, this design is further described in detail.
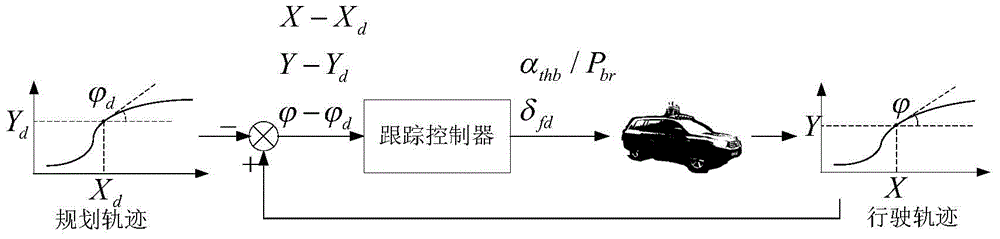
[0057] see figure 1 , the invention is used for the design of the tracking controller when the unmanned vehicle tracks the planned trajectory.
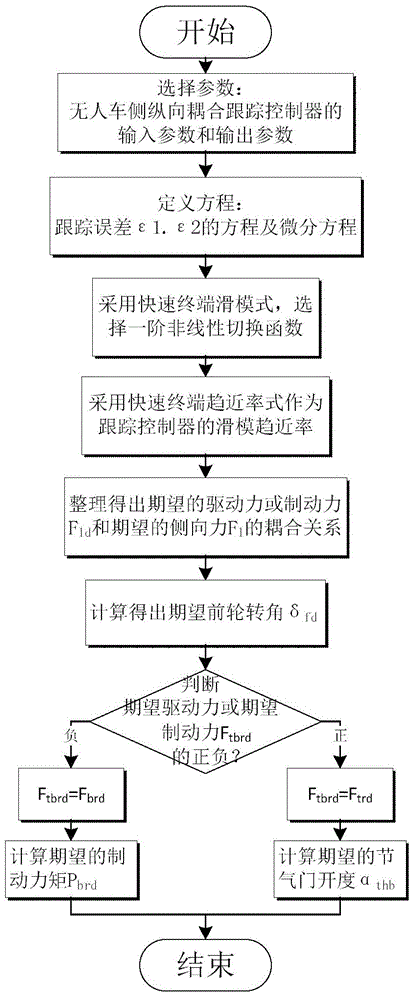
[0058] see figure 2 , the present invention is based on the rapid terminal sliding mode principle of unmanned vehicle side longitudinal coupling tracking control method is divided into the following nine steps, each step is as follows:
[0059] 1) Select the input parameters and output parameters of the unmanned vehicle side longitudinal coupling tracking controller according to the planned trajectory:
[0060] (1a) Input parameters: the current coordinates of the center of mass of the unmanned vehicle and the coordinate error of the planned point on the planned trajectory X-X d , Y-Y d ; The error between the yaw angle of the speed vector of the unmanned vehicle and the yaw angle of the planning point where...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More