

Virtual reality walking control method and system based on inertia sensor
An inertial sensor and virtual reality technology, applied in the field of virtual reality walking control, can solve the problems of strong dizziness, high cost, and large size of the omnidirectional mobile platform, and achieve the effect of simple and easy to use, low price, and small size of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
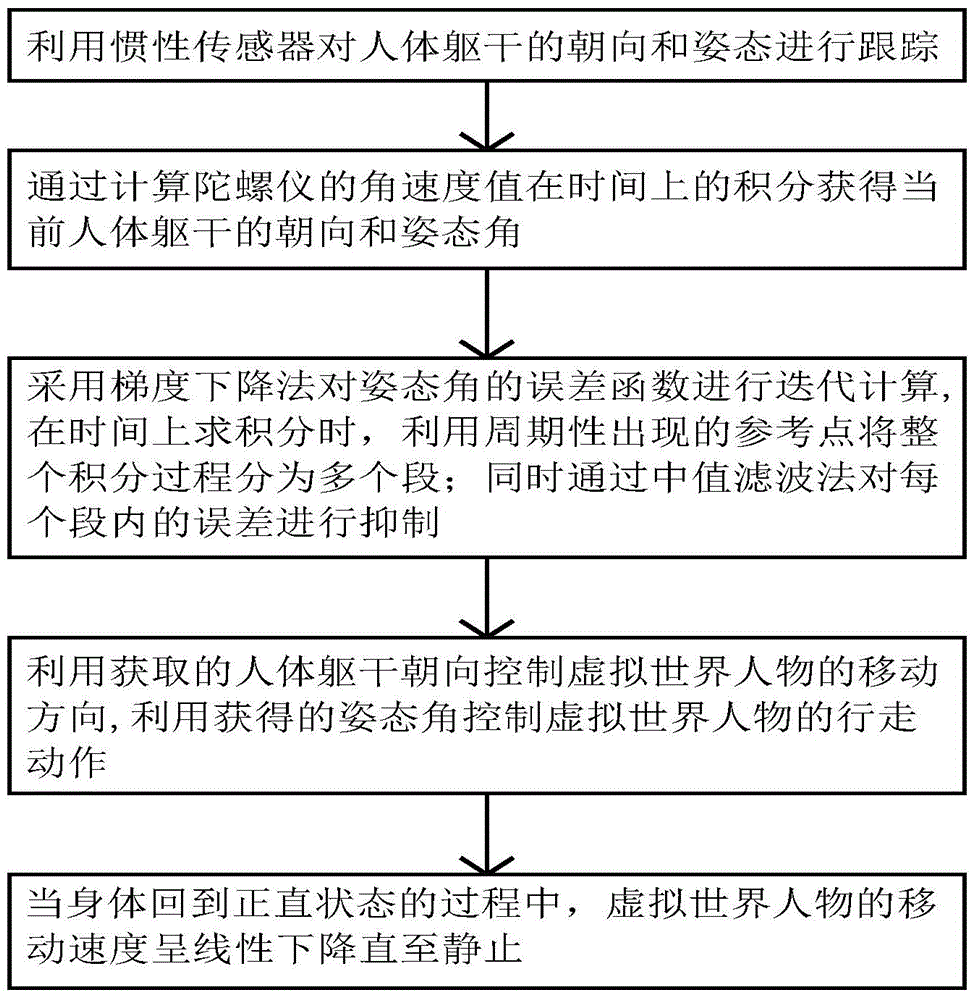
[0027] Embodiment 1 of the present invention: a method for virtual reality walking control based on inertial sensors, such as figure 1 shown, including the following steps:
[0028] S1, using inertial sensors to track the orientation and posture of the human torso;
[0029] S2, obtain the orientation and attitude angle of the current human torso by calculating the integral of the angular velocity value of the gyroscope in time (specifically, at first, the gyroscope can obtain the direction perpendicular to the ground by means of the magnetometer to measure the earth's magnetic field; Secondly, the gyroscope can measure the angular acceleration value, and the angular velocity value can be obtained by integrating the angular acceleration value in time; again, the angular value can be obtained by integrating the angular velocity value in time; finally, the angular value and Comparing the previously obtained direction perpendicular to the ground, the orientation and attitude angl...
Embodiment 2
[0032] Embodiment 2: a kind of method that carries out virtual reality walking control based on inertial sensor, comprises the following steps:
[0033] S1, using inertial sensors to track the orientation and posture of the human torso;
[0034] S2, use the acquired human torso orientation to control the moving direction of the virtual world characters; at the same time, use the obtained attitude angle to control the walking action of the virtual world characters—use the forward, backward, left, and right inclinations of the human torso to control the virtual world in one-to-one correspondence The character's forward, backward, leftward translation, rightward translation; and use the forward tilt angle, backward tilt angle, left tilt angle, right tilt angle of the human body to control the forward speed, backward speed, and leftward translation speed of the virtual world character in one-to-one correspondence , right pan speed.
[0035] A system for implementing the above met...
Embodiment 3
[0036] Embodiment 3: a kind of method that carries out virtual reality walking control based on inertial sensor, such as figure 1 So, include the following steps:
[0037] S1, using inertial sensors to track the orientation and posture of the human torso;
[0038] S2. Obtain the orientation and attitude angle of the current human torso by calculating the integral of the angular velocity value of the gyroscope in time; use the acquired orientation of the human body torso to control the moving direction of the virtual world character; at the same time use the obtained attitude angle to control the walking of the virtual world character action.
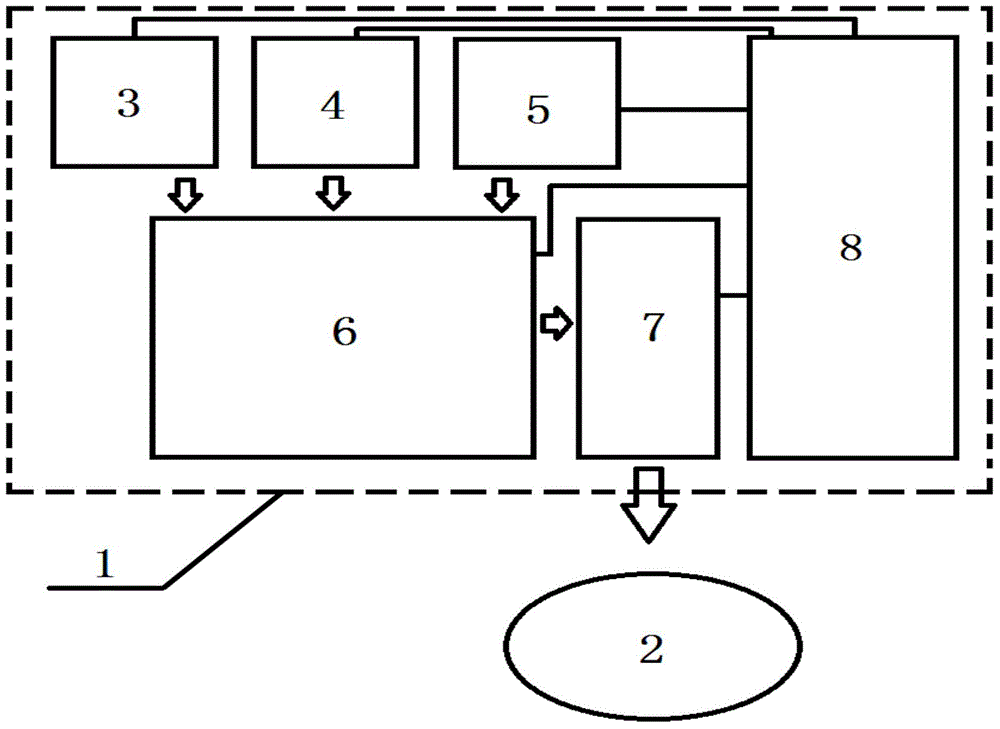
[0039] A system for implementing the above method based on inertial sensors for virtual reality walking control, such as figure 2 As shown, it includes: an inertial sensor 1 and a computing control platform 2. The inertial sensor 1 is connected to the computing control platform 2. The inertial sensor 1 is used to track the orientation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More