

Multi-degree-of-freedom robot
A robot and degree-of-freedom technology, applied in the field of robots, can solve the problems that the overall motion posture is not realistic enough, the real-time performance is not strong enough, and the flexibility is not strong enough, so as to achieve the effect of flexible motion trajectory.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with specific drawings and embodiments.
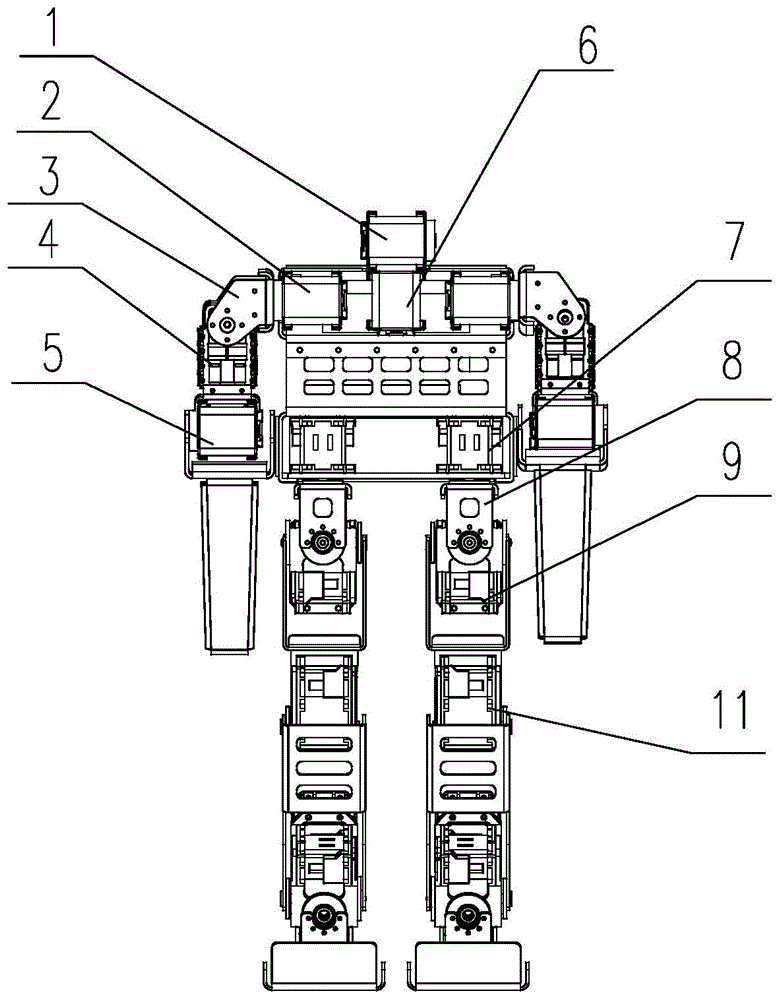
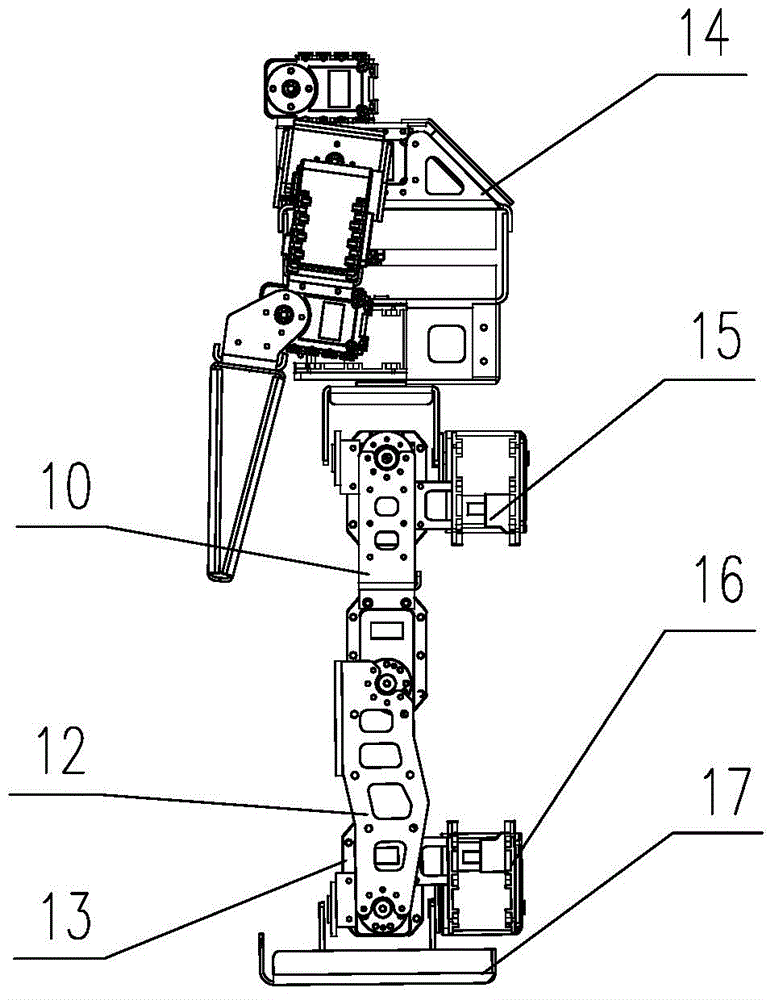
[0021] The multi-degree-of-freedom robot provided by the present invention, such as figure 1 As shown, includes a fuselage 100, also includes:
[0022] Head up and down rotation joint 1, upper shoulder joint 2, shoulder joint connection seat 3, lower shoulder joint 4, elbow joint 5, head left and right rotation joint 6, upper hip joint 7, hip joint connection seat 8, lower hip joint 9, Thigh piece 10, knee joint 11, calf piece 12, front ankle joint 13, protective cover 14, rear hip joint 15, rear ankle joint 16, sole 17;
[0023] The top of the fuselage 100 is equipped with the head left and right rotation joints 6 and the head up and down rotation joints 1 for connecting the robot head;
[0024] The upper shoulder joint 2 is installed on the left and right shoulders of the fuselage 100, the upper shoulder joint 2 is connected with the shoulder joint connecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More