

Exoskeleton rehabilitation aids
An auxiliary device and exoskeleton technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of affecting the effect of ambulatory rehabilitation training, difficulty in ensuring symmetry, and high economic pressure on users, and achieve industrial mass production. The effect of reducing the economic burden and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
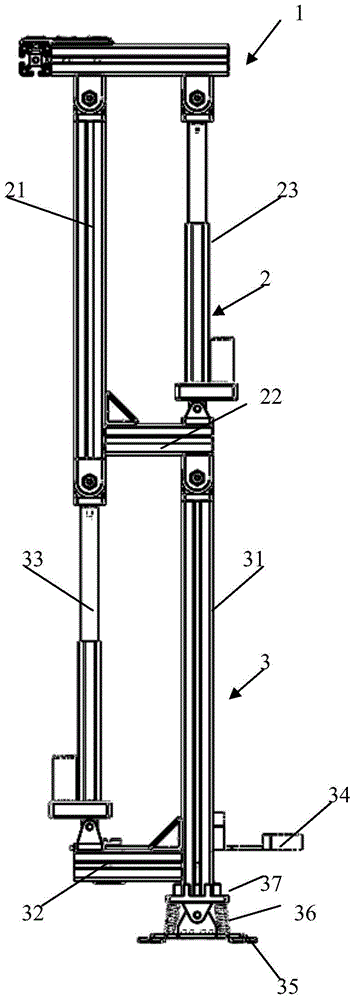
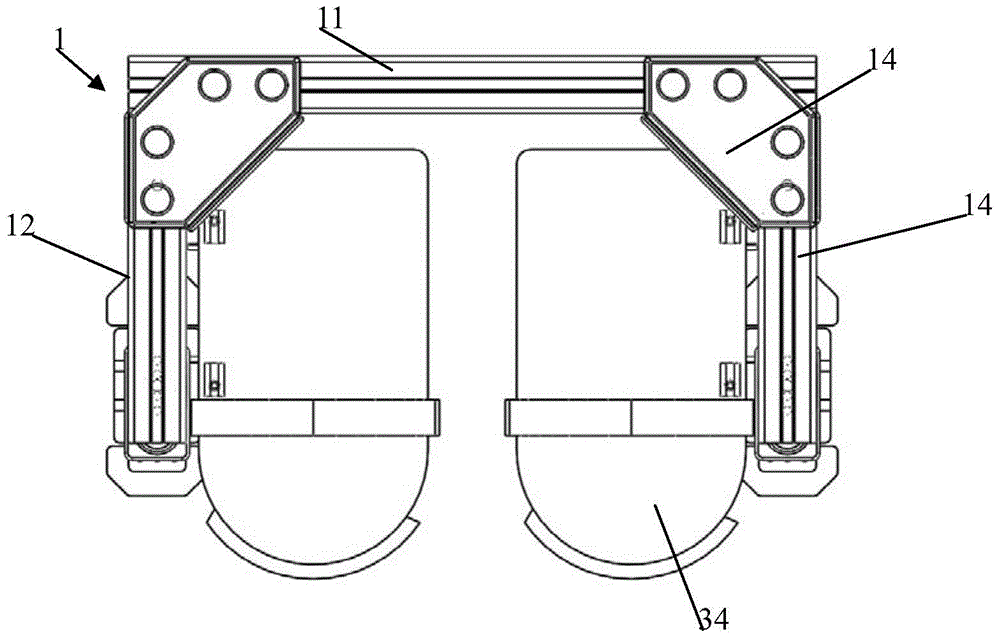
[0028] like Figure 1-3 As shown, the exoskeleton type rehabilitation assisting device of the present invention includes an exoskeleton rehabilitation device and a crutch (not shown) provided with a walking aid controller, and the exoskeleton rehabilitation device includes a lumbar support 1, a thigh assembly 2, The calf and foot assembly 3, a backpack-type battery pack and a control unit connected in communication with the walking aid controller, wherein the battery pack supplies energy for each electrical module, and its weight is provided by the weight attached to the waist support. The attached bracket bears, the thigh assembly 2 includes two thigh bars 21 respectively hinged on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More