

Bionic waist mechanism of humanoid robot and with telescoping driving devices
A humanoid robot and waist technology, applied in the field of humanoid robots, can solve the problems of complex waist mechanism, increase motor load, increase waist weight, etc., and achieve the effect of obvious weight reduction, weight reduction, and improvement of load capacity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
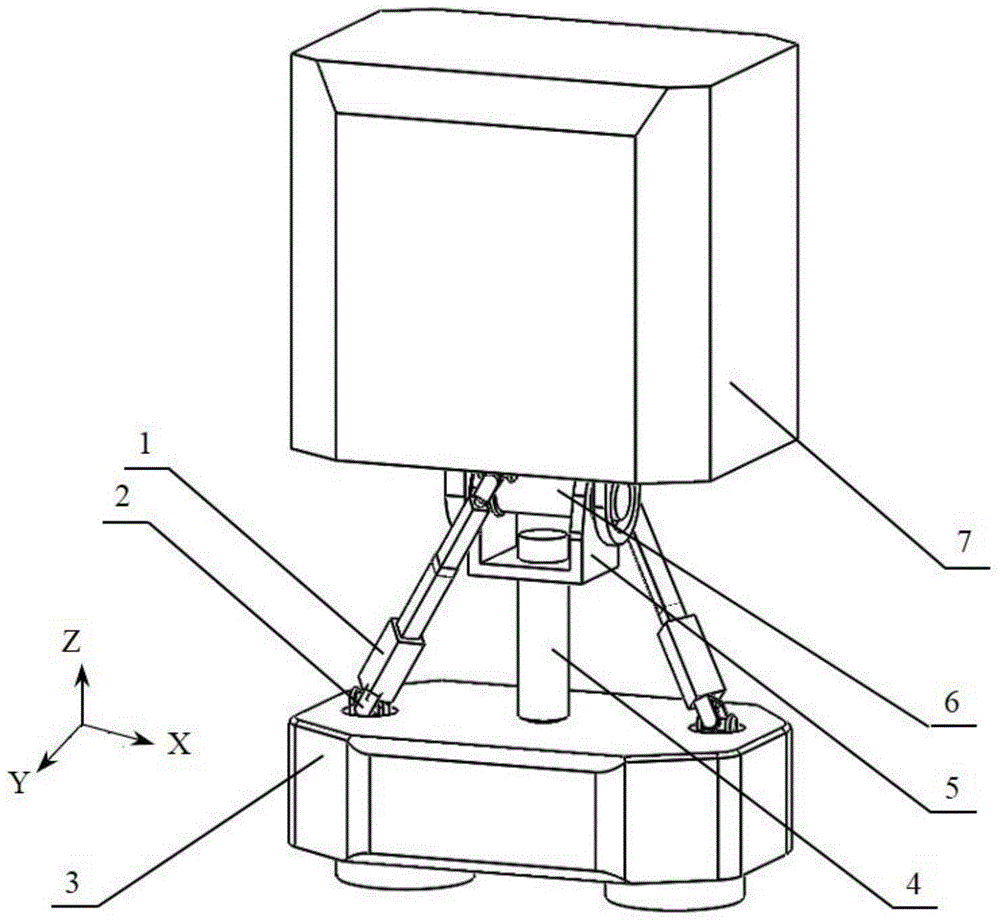
[0035] The bionic waist mechanism of the humanoid robot of the present invention is a parallel differential structure, and includes a linear drive input module, a pitch deflection output module, and a support connection structure.
[0036] The bionic waist mechanism is located between the chest platform 7 and the waist platform 3. The chest platform 7 belongs to the upper body and connects the arms and the head, and the waist platform 3 is connected to the legs downward.
[0037] The linear drive input module includes two parallel linear telescopic drive devices 1, and the two linear telescopic drive devices 1 are independently driven. The linear telescopic drive device 1 is inclined and symmetrically distributed relative to the vertical axis of the humanoid robot in space. The linear telescopic driving device 1 includes an electric push rod, a hydraulic rod or a pneumatic push rod. The linear telescopic driving device 1 is provided with a motor, and the rotary motion of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More