

Device and method for controlling intelligent artificial limb based on eye and lower jaw electromyographic signals
A technology of myoelectric signals and intelligent prosthetics, applied in the field of control devices for intelligent prosthetics based on eye and mandibular myoelectric signals, can solve problems such as large errors, unstable acquisition signals, and large interference of brain control signals, and achieve good results. Accurate control, large range of motion, and easy-to-collect effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
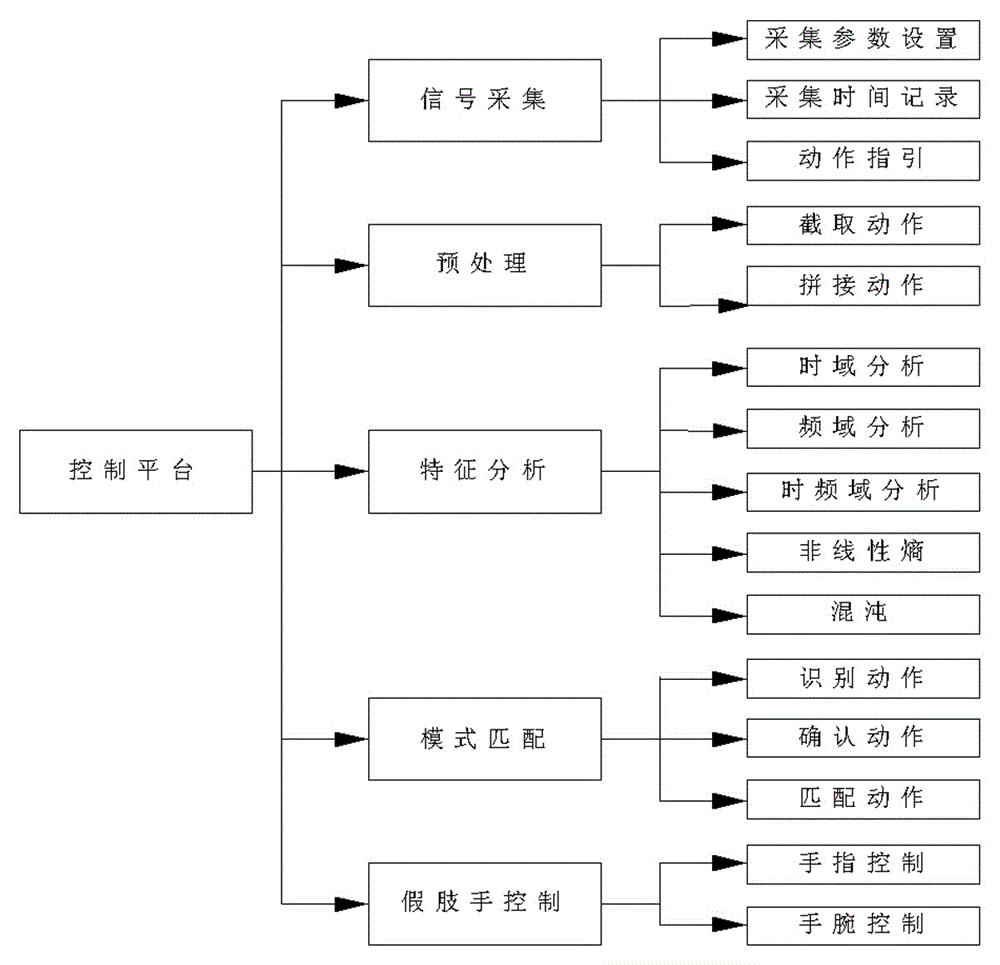
[0032] detailed description: Below in conjunction with accompanying drawing, the present invention will be further described:
[0033] Such as figure 1 As shown, the present invention provides a control device for intelligent prosthetics based on eye and jaw electromyographic signals, which includes an eye or jaw surface electromyographic signal acquisition module, an electromyographic signal processing module, an eye or jaw motion feature extraction module, and a feature Matching module and prosthesis control module; the eye or jaw surface EMG signal acquisition module is connected to the EMG signal processing module, the EMG signal processing module is connected to the eye or jaw motion feature extraction module, the eye or jaw motion feature extraction module is connected to the feature matching module, and the feature The matching module is connected with the prosthesis control module.
[0034] The prosthesis control module includes a four-finger motor, a thumb motor a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More